- 2021-02-26 发布 |
- 37.5 KB |
- 7页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
备战2021 浙教版科学中考专题训练 第48讲 能量转化综合计算专题
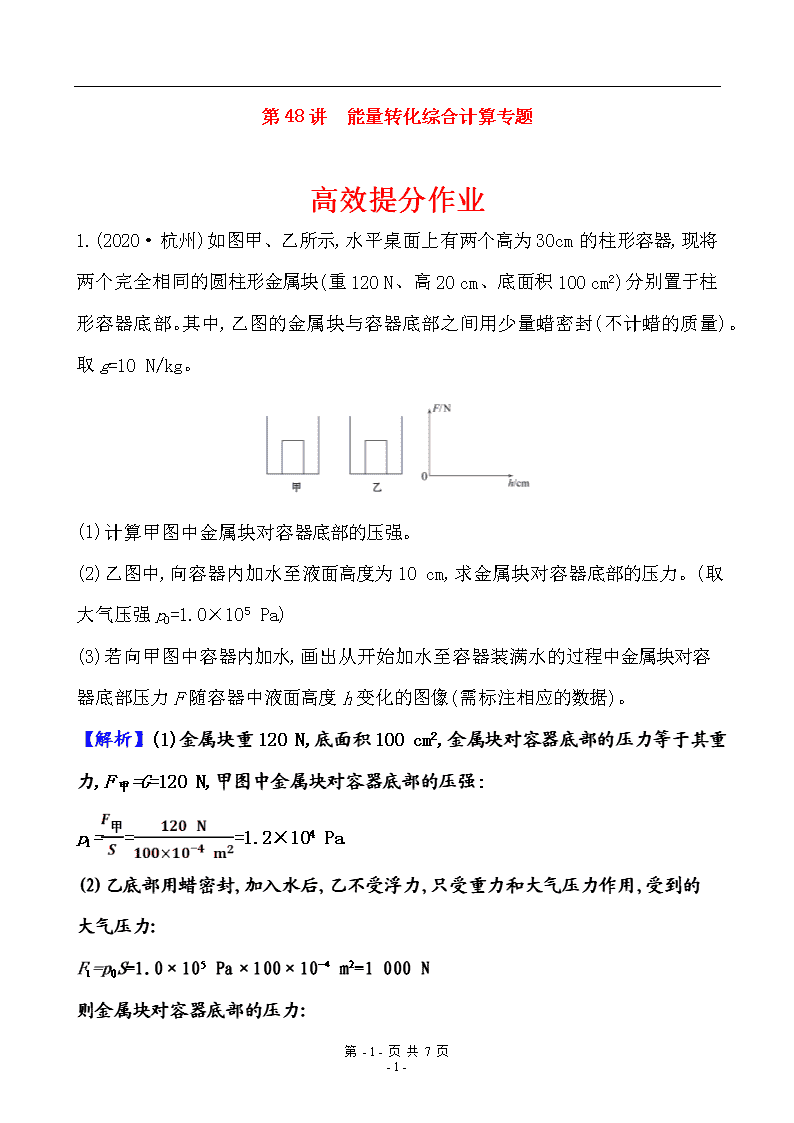
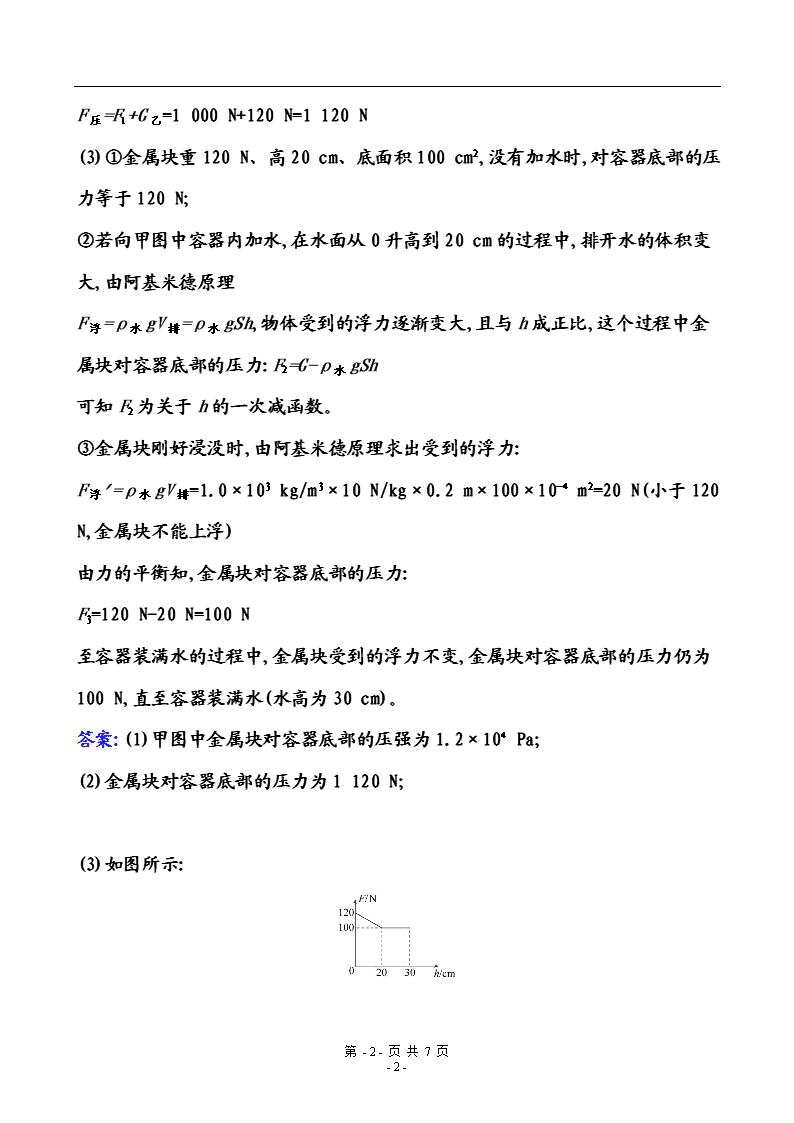
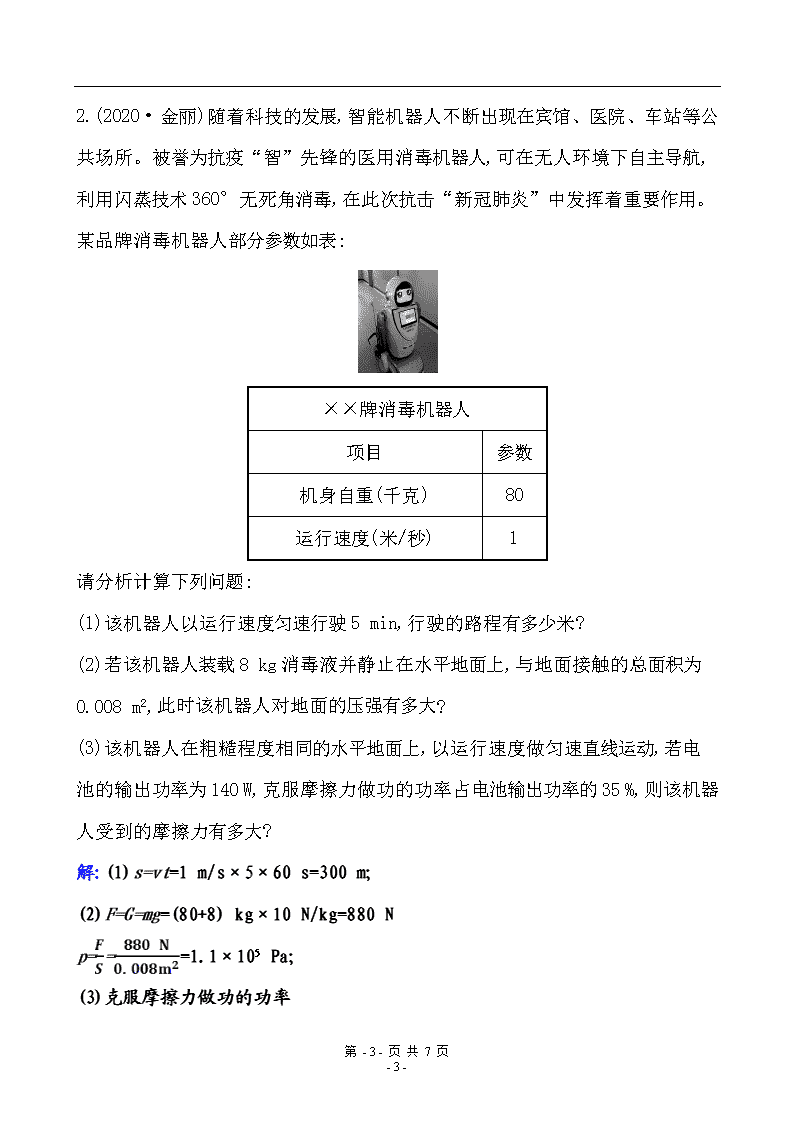
第 - 1 - 页 共 7 页 - 1 - 第 48 讲 能量转化综合计算专题 高效提分作业 1.(2020·杭州)如图甲、乙所示,水平桌面上有两个高为 30 cm 的柱形容器,现 将两个完全相同的圆柱形金属块(重 120 N、高 20 cm、底面积 100 cm2)分别置 于柱形容器底部。其中,乙图的金属块与容器底部之间用少量蜡密封(不计蜡的 质量)。取 g=10 N/kg。 (1)计算甲图中金属块对容器底部的压强。 (2)乙图中,向容器内加水至液面高度为 10 cm,求金属块对容器底部的压力。(取 大气压强 p0=1.0×105 Pa) (3)若向甲图中容器内加水,画出从开始加水至容器装满水的过程中金属块对容 器底部压力 F 随容器中液面高度 h 变化的图像(需标注相应的数据)。 【解析】(1)金属块重 120 N,底面积 100 cm2,金属块对容器底部的压力等于其重 力,F 甲=G=120 N,甲图中金属块对容器底部的压强: p1= = =1.2×104 Pa (2)乙底部用蜡密封,加入水后,乙不受浮力,只受重力和大气压力作用,受到的 大气压力: F1=p0S=1.0×105 Pa×100×10-4 m2=1 000 N 则金属块对容器底部的压力: 第 - 2 - 页 共 7 页 - 2 - F 压=F1+G 乙=1 000 N+120 N=1 120 N (3)①金属块重 120 N、高 20 cm、底面积 100 cm2,没有加水时,对容器底部的压 力等于 120 N; ②若向甲图中容器内加水,在水面从 0 升高到 20 cm 的过程中,排开水的体积变 大,由阿基米德原理 F 浮=ρ水 gV 排=ρ水 gSh,物体受到的浮力逐渐变大,且与 h 成正比,这个过程中金属 块对容器底部的压力:F2=G-ρ水 gSh 可知 F2 为关于 h 的一次减函数。 ③金属块刚好浸没时,由阿基米德原理求出受到的浮力: F 浮'=ρ水 gV 排=1.0×103 kg/m3×10 N/kg×0.2 m×100×10-4 m2=20 N(小于 120 N, 金属块不能上浮) 由力的平衡知,金属块对容器底部的压力: F3=120 N-20 N=100 N 至容器装满水的过程中,金属块受到的浮力不变,金属块对容器底部的压力仍为 100 N,直至容器装满水(水高为 30 cm)。 答案:(1)甲图中金属块对容器底部的压强为 1.2×104 Pa; (2)金属块对容器底部的压力为 1 120 N; (3)如图所示: 第 - 3 - 页 共 7 页 - 3 - 2.(2020·金丽)随着科技的发展,智能机器人不断出现在宾馆、医院、车站等公 共场所。被誉为抗疫“智”先锋的医用消毒机器人,可在无人环境下自主导航, 利用闪蒸技术 360°无死角消毒,在此次抗击“新冠肺炎”中发挥着重要作用。 某品牌消毒机器人部分参数如表: ××牌消毒机器人 项目 参数 机身自重(千克) 80 运行速度(米/秒) 1 请分析计算下列问题: (1)该机器人以运行速度匀速行驶 5 min,行驶的路程有多少米? (2)若该机器人装载 8 kg 消毒液并静止在水平地面上,与地面接触的总面积为 0.008 m2,此时该机器人对地面的压强有多大? (3)该机器人在粗糙程度相同的水平地面上,以运行速度做匀速直线运动,若电 池的输出功率为 140 W,克服摩擦力做功的功率占电池输出功率的 35 %,则该机 器人受到的摩擦力有多大? 解:(1)s=vt=1 m/s×5×60 s=300 m; (2)F=G=mg=(80+8) kg×10 N/kg=880 N p= = =1.1×105 Pa; (3)克服摩擦力做功的功率 第 - 4 - 页 共 7 页 - 4 - P=140 W×35 %=49 W f=F= = =49 N。 3.康康家有一台家用电水壶如图甲,他发现电水壶有加热和保温两种功能。如图 乙所示是其内部电路的简图,R1、R2 均为加热电阻,通过旋转旋钮开关可以实现加 热和保温两种功能的切换。电水壶加热功率为 1 000 W,保温功率为 44 W[c 水 =4.2×103 J/(kg·℃),ρ水=1.0×103 kg/m3],求: (1)把 500 g 的水从 40 ℃加热到 100 ℃,水壶要吸收的热量; (2)不计热量损失,使用电水壶的加热挡完成问题(1)中的加热过程需要的时间; (3)忽略温度对电阻阻值的影响,加热电阻 R1 的阻值。 解:(1)水壶要吸收的热量: Q 吸=cmΔt=4.2×103 J/(kg·℃)×0.5 kg×(100 ℃-40 ℃)=1.26×105 J; (2)由于不计热量损失,则消耗的电能 W=Q=1.26×105 J; 由 P= 可得,加热过程需要的时间: t= = =126 s; (3)当开关 S 接到 2 时,电路为 R2 的简单电路,此时电路中电阻小,消耗的功率大, 为加热状态, 根据 P= 可得电阻 R2 的阻值: R2= = =48.4 Ω, 第 - 5 - 页 共 7 页 - 5 - 当开关S切换到1时,两电阻串联,此时为保温状态,由 P= 可得,电路的总电阻: R 总= = =1 100 Ω, 根据串联电路的电阻特点可知,R1 的阻值: R1=R 总-R2=1 100 Ω-48.4 Ω=1 051.6 Ω。 4.(2020·衢州)为提高垃圾分类效率,小科设计了如图甲所示的垃圾分类机器 人。它捡起垃圾时,会快速从垃圾上取出标准规格的样品。通过机械手上的探针 检测样品的电阻大小来识别垃圾的类别,并投入相应的垃圾桶。该机器人检测电 路如图乙所示。各类垃圾样品的电阻参考值如表。 样品电阻值/Ω 垃圾类别 小于 10 金属 10-30 餐厨 大于 30 其他 (1)机器人通过摄像头获得二维码倒立、缩小的像来识别垃圾桶。下列物体成像 原理与其相同的是 。 A.平面镜 B.照相机 C.放大镜 D.眼球 第 - 6 - 页 共 7 页 - 6 - (2)机器人从某块垃圾上取样检测时。检测电路电压表读数为 1 V,检测时间为 0.1 s。 ①通过计算说明应将该垃圾放入图丙中哪个垃圾桶。 ②该次检测电阻过程中,检测电路消耗的电能为多少? (3)机器人将重 1 N 的垃圾举高 70 cm 后再水平移动 3 m,放入相应的垃圾桶。该 过程中机器人至少对垃圾做了多少功? 【解析】(1)机器人通过摄像头获得二维码倒立、缩小的像,其应用与照相机的 成像原理和人的眼睛的成像原理相同;故选 B、D; (2)①由图可知,样品两端的电压为: U'=U-UV=1.5 V-1 V=0.5 V; 电路中的电流为:I= = =0.1 A 根据欧姆定律可知,样品的电阻为: R 样品= = =5 Ω; 根据表格中的数据可知,垃圾的类别为金属,需要放入第一个垃圾桶中; ②该次检测电阻过程中。检测电路消耗的电能为: W=UIt=1.5 V×0.1 A×0.1 s=0.015 J; (3)机器人将重 1 N 的垃圾举高 70 cm 后所做的功为:W'=Gh=1 N×0.7 m=0.7 J; 水平移动 3 m 的过程中,力的方向是竖直向上的,移动的距离在水平方向上,所以 机器人不做功,故所做的总功为 W'=0.7 J。 答案:(1)B、D (2)①第一个垃圾桶 计算过程见解析 ②检测电路消耗的电能 为 0.015 J (3)所做的总功为 0.7 J 第 - 7 - 页 共 7 页 - 7 -查看更多