- 2021-05-25 发布 |
- 37.5 KB |
- 3页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
高中数学第一讲坐标系单元整合学案新人教A版选修4-41
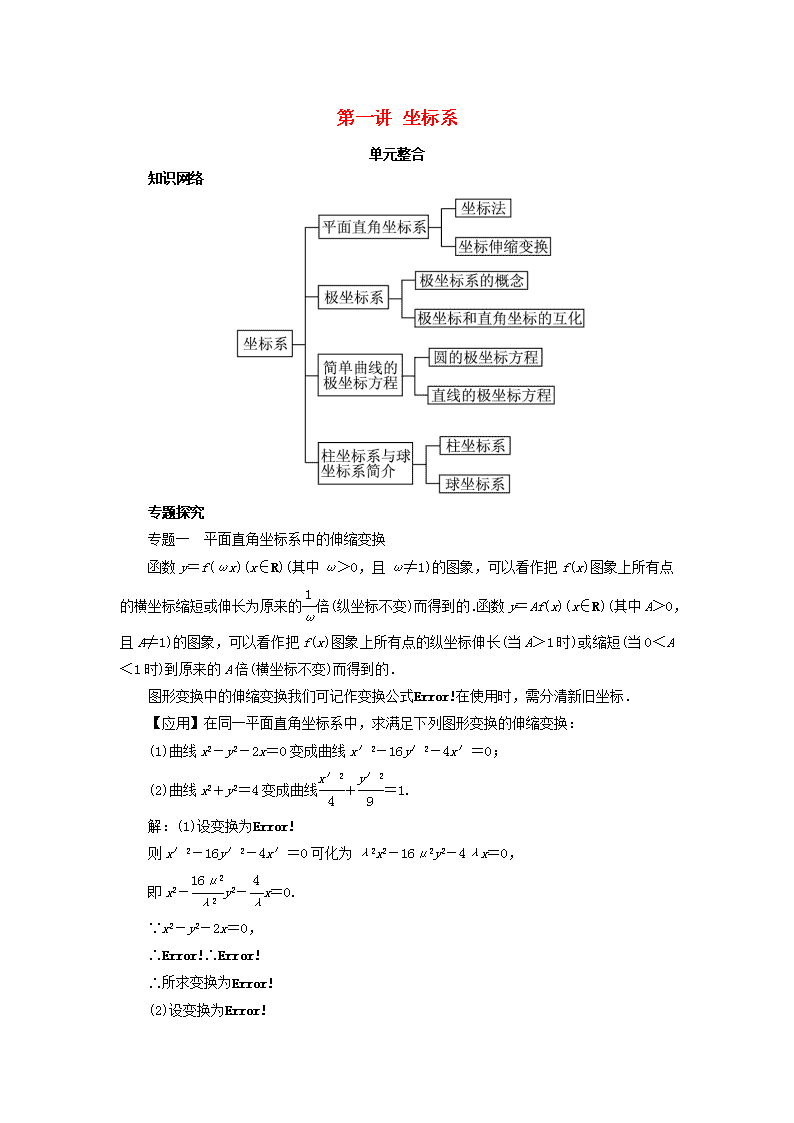
第一讲 坐标系 单元整合 知识网络 专题探究 专题一 平面直角坐标系中的伸缩变换 函数 y=f(ωx)(x∈R)(其中ω>0,且ω≠1)的图象,可以看作把 f(x)图象上所有点的 横坐标缩短或伸长为原来的 1 ω 倍(纵坐标不变)而得到的.函数 y=Af(x)(x∈R)(其中 A>0, 且 A≠1)的图象,可以看作把 f(x)图象上所有点的纵坐标伸长(当 A>1 时)或缩短(当 0<A <1 时)到原来的 A 倍(横坐标不变)而得到的. 图形变换中的伸缩变换我们可记作变换公式 x′=λx(λ>0), y′=μy(μ>0), 在使用时,需分清 新旧坐标. 【应用】在同一平面直角坐标系中,求满足下列图形变换的伸缩变换: (1)曲线 x2-y2-2x=0 变成曲线 x′2-16y′2-4x′=0; (2)曲线 x2+y2=4 变成曲线x′2 4 +y′2 9 =1. 解:(1)设变换为 x′=λx(λ>0), y′=μy(μ>0), 则 x′2-16y′2-4x′=0 可化为λ2x2-16μ2y2-4λx=0, 即 x2-16μ2 λ2 y2- 4 λ x=0. ∵x2-y2-2x=0, ∴ 4 λ =2, 16μ2 λ2 =1. ∴ λ=2, μ=1 2 . ∴所求变换为 x′=2x, y′=1 2 y. (2)设变换为 x′=λx(λ>0), y′=μy(μ>0), 则有 λ2 4 x2+μ2 9 y2=1. 又x2 4 +y2 4 =1,∴ λ2 4 =1 4 , μ2 9 =1 4 . ∴ λ=1, μ=3 2 . ∴所求变换为 x′=x, y′=3 2 y. 专题二 极坐标的应用 在极坐标系中,有关点到直线的距离,圆与直线的位置关系的判断等问题,一般先将极 坐标(方程)转化为直角坐标(方程).再求解. 【应用】求点 M 4,π 3 到直线ρcos θ-π 3 =2 上的点的距离的最小值. 提示:可以先化为直角坐标再求解. 解:点 M 的直角坐标为(2,2 3), ∵ρcos θ-π 3 =2, ∴ρ cos θcosπ 3 +sin θsinπ 3 =2. ∴1 2 ρcos θ+ 3 2 ρsin θ=2. ∴1 2 x+ 3 2 y=2,即 x+ 3y-4=0. ∴d=|2+2 3× 3-4| 1+3 =2, 即点 M 到直线ρcos θ-π 3 =2 上的点的距离的最小值为 2. 专题三 求轨迹的极坐标方程 求轨迹方程的方法——直接法、定义法、相关点代入法等,在极坐标中仍然适用,注意 求谁设谁,找出所设点的坐标,ρ,θ所满足的关系式,再化简求解. 【应用 1】从原点 O 引直线交直线 2x+4y-1=0 于点 M,P 为 OM 上一点,已知|OP||OM| =1.求点 P 的轨迹的极坐标方程. 提示:本题中,由于 P,M,O 三点共线,因此∠POx=∠MOx,可建立极坐标系,求其轨 迹方程. 解:以 O 为极点,x 轴正方向为极轴建立极坐标系,直线方程化为 2ρcos θ+4ρsin θ -1=0.设 M(ρ0,θ0),P(ρ,θ), 则 2ρ0cos θ0+4ρ0sin θ0-1=0.① 由 θ=θ0, ρ0·ρ=1, 知 θ0=θ, ρ0= 1 ρ . 代入①得,2 1 ρ cos θ+4 1 ρ sin θ-1=0, ∴ρ=2cos θ+4sin θ. 点评 (1)当所求的动点的轨迹与已知点及原点共线时,可用建立极坐标系的方法求其 轨迹方程,因为此时动点与已知点有相同的极角. (2)本题中求轨迹的方法称为代入法. 【应用 2】已知定点 A(a,0),动点 P 对极点 O 和点 A 的张角∠OPA=π 3 .在 OP 的延长线 上取点 Q,使|PQ|=|PA|.当点 P 在极轴上方运动时,求点 Q 的轨迹的极坐标方程. 解:设点 Q,P 的坐标分别是(ρ,θ),(ρ1,θ1), 则θ=θ1. 在△POA 中,|OP|=ρ1= a sinπ 3 ·sin 2π 3 -θ ,|PA|= asin θ sinπ 3 . 又|OQ|=|OP|+|PQ|=|OP|+|PA|,化简可得 ρ=2acos π 3 -θ . 故点 Q 的轨迹的极坐标方程为ρ=2acos π 3 -θ . 点评 求曲线的极坐标方程,一般方法是构造三角形,利用直角三角形的边角关系或余 弦定理列出关系式.查看更多