高考物理必看之解题模型
高考物理解题模型
目 录
第一章 运动和力 ..........................................................................................................................1
一、追及、相遇模型...............................................................................................................1
二、先加速后减速模型 ..........................................................................................................3
三、斜面模型 ............................................................................................................................6
四、挂件模型 ..........................................................................................................................10
五、弹簧模型(动力学)....................................................................................................17
第二章 圆周运动 ........................................................................................................................19
一、水平方向的圆盘模型....................................................................................................19
二、行星模型 ..........................................................................................................................21
第三章 功和能 ...............................................................................................................................1
一、水平方向的弹性碰撞......................................................................................................1
二、水平方向的非弹性碰撞.................................................................................................5
三、人船模型 ............................................................................................................................8
四、爆炸反冲模型 .................................................................................................................11
第四章 力学综合 ........................................................................................................................13
一、解题模型:......................................................................................................................13
二、滑轮模型 ..........................................................................................................................18
三、渡河模型 ..........................................................................................................................21
第五章 电路.....................................................................................................................................1
一、电路的动态变化...............................................................................................................1
二、交变电流 ............................................................................................................................6
第六章 电磁场 ...............................................................................................................................1
一、电磁场中的单杆模型......................................................................................................1
二、电磁流量计模型...............................................................................................................7
三、回旋加速模型 ...................................................................................................................9
四、磁偏转模型......................................................................................................................14
第一章 运动和力
一、追及、相遇模型
模型讲解:
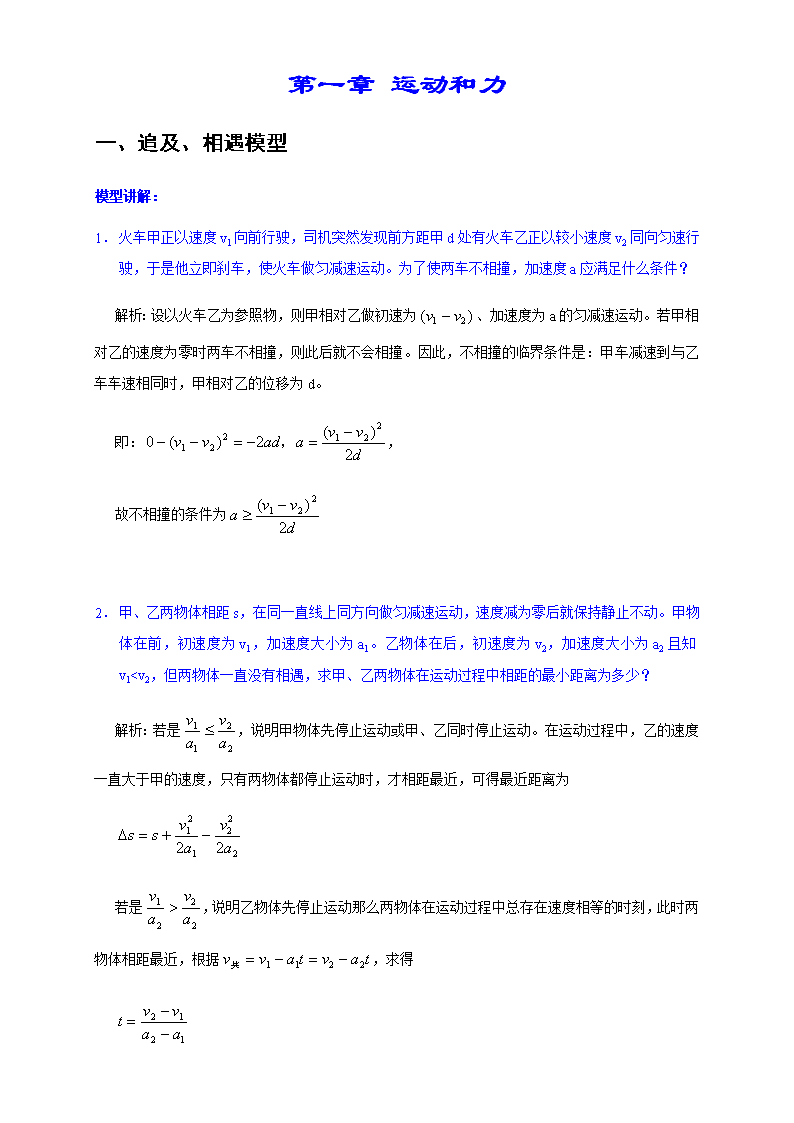
1. 火车甲正以速度 v1 向前行驶,司机突然发现前方距甲 d 处有火车乙正以较小速度 v2 同向匀速行
驶,于是他立即刹车,使火车做匀减速运动。为了使两车不相撞,加速度 a 应满足什么条件?
解析:设以火车乙为参照物,则甲相对乙做初速为 、加速度为 a 的匀减速运动。若甲相
对乙的速度为零时两车不相撞,则此后就不会相撞。因此,不相撞的临界条件是:甲车减速到与乙
车车速相同时,甲相对乙的位移为 d。
即: ,
故不相撞的条件为
2. 甲、乙两物体相距 s,在同一直线上同方向做匀减速运动,速度减为零后就保持静止不动。甲物
体在前,初速度为 v1,加速度大小为 a1。乙物体在后,初速度为 v2,加速度大小为 a2 且知
v1
tavtavv 2211 −=−=共
12
12
aa
vvt −
−=
在 t 时间内
甲的位移
乙的位移
代入表达式
求得
3. 如图 1.01 所示,声源 S 和观察者 A 都沿 x 轴正方向运动,相对于地面的速率分别为 和 。
空气中声音传播的速率为 ,设 ,空气相对于地面没有流动。
图 1.01
(1) 若声源相继发出两个声信号。时间间隔为 ,请根据发出的这两个声信号从声源传播
到观察者的过程。确定观察者接收到这两个声信号的时间间隔 。
(2) 请利用(1)的结果,推导此情形下观察者接收到的声波频率与声源发出的声波频率间
的关系式。
解析:作声源 S、观察者 A、声信号 P(P1 为首发声信号,P2 为再发声信号)的位移—时间图象
如图 2 所示图线的斜率即为它们的速度 则有:
图 2
tvvs 2
1
1
+= 共
tvvs 2
2
2
+= 共
21 ssss −+=∆
)(2
)(
12
12
aa
vvss −
−−=∆
Sv Av
Pv PAPS vvvv << ,
t∆
't∆
PAS vvv 、、
两式相减可得:
解得
(2)设声源发出声波的振动周期为 T,这样,由以上结论,观察者接收到的声波振动的周期为
由此可得,观察者接收到的声波频率与声源发出声波频率间的关系为
4. 在一条平直的公路上,乙车以 10m/s 的速度匀速行驶,甲车在乙车的后面作初速度为 15m/s,加
速度大小为 0.5m/s2 的匀减速运动,则两车初始距离 L 满足什么条件时可以使(1)两车不相遇;
(2)两车只相遇一次;(3)两车能相遇两次(设两车相遇时互不影响各自的运动)。
答案:设两车速度相等经历的时间为 t,则甲车恰能追及乙车时,应有
其中 ,解得
若 ,则两车等速时也未追及,以后间距会逐渐增大,及两车不相遇。
若 ,则两车等速时恰好追及,两车只相遇一次,以后间距会逐渐增大。
若 ,则两车等速时,甲车已运动至乙车前面,以后还能再次相遇,即能相遇两次。
)'(''
)(
0
0
ttvtvs
ttvtvs
PA
PS
−∆⋅=∆⋅=∆
−∆⋅=∆⋅=∆
)'(' ttvtvtv PSA ∆−∆⋅=∆⋅−∆⋅
tvv
vvt
AP
SP ∆−
−=∆ '
Tvv
vvT
AP
SP
−
−='
fvv
vvf
SP
AP
−
−='
Ltv
ta
tv +=− 乙
甲
甲 2
2
甲
乙甲
a
vv
t
−
= mL 25=
mL 25>
mL 25=
mL 25<
二、先加速后减速模型
模型概述:
物体先加速后减速的问题是运动学中典型的综合问题,也是近几年的高考热点,同学在求
解这类问题时一定要注意前一过程的末速度是下一过程的初速度,如能画出速度图象就更明确
过程了。
模型讲解:
1. 一小圆盘静止在桌面上,位于一方桌的水平桌面的中央。桌布的一边与桌的 AB 边重合,如图
1.02 所示。已知盘与桌布间的动摩擦因数为 ,盘与桌面间的动摩擦因数为 。现突然以恒定
加速度 a 将桌布抽离桌面,加速度方向是水平的且垂直于 AB 边。若圆盘最近未从桌面掉下,则
加速度 a 满足的条件是什么?(以 g 表示重力加速度)
图 1.02
解析:根据题意可作出物块的速度图象如图 2 所示。设圆盘的质量为 m,桌边长为 L,在桌布从
圆盘下抽出的过程中,盘的加速度为 ,有
图 2
桌布抽出后,盘在桌面上做匀减速运动,以 表示加速度的大小,有
设盘刚离开桌布时的速度为 ,移动的距离为 ,离开桌布后在桌面上再运动距离 后便停下,
1µ 2µ
1a 11 mamg =µ
2a 22 mamg =µ
1v 1x 2x
由匀变速直线运动的规律可得:
① ②
盘没有从桌面上掉下的条件是: ③
设桌布从盘下抽出所经历时间为 t,在这段时间内桌布移动的距离为 x,有:
,而 ,求得:
,及
联立解得
2. 一个质量为 m=0.2kg 的物体静止在水平面上,用一水平恒力 F 作用在物体上 10s,然后撤去水平
力 F,再经 20s 物体静止,该物体的速度图象如图 3 所示,则下面说法中正确的是( )
A. 物体通过的总位移为 150m
B. 物体的最大动能为 20J
C. 物体前 10s 内和后 10s 内加速度大小之比为 2:1
D. 物体所受水平恒力和摩擦力大小之比为 3:1
答案:ACD
图 3
11
2
1 2 xav = 22
2
1 2 xav =
221
Lxx ≤+
2
11
2
2
1
2
1 taxatx == ,
21
Lxx =−
1aa
Lt −=
1
111 aa
Latav −==
2
121 )2(
µ
µµµ ga
+≥
三、斜面模型
1. 相距为 20cm 的平行金属导轨倾斜放置,如图 1.03,导轨所在平面与水平面的夹角为 ,
现在导轨上放一质量为 330g 的金属棒 ab,它与导轨间动摩擦系数为 ,整个装置处于
磁感应强度 B=2T 的竖直向上的匀强磁场中,导轨所接电源电动势为 15V,内阻不计,滑动变阻
器的阻值可按要求进行调节,其他部分电阻不计,取 ,为保持金属棒 ab 处于静止
状态,求:
(1)ab 中通入的最大电流强度为多少?
(2)ab 中通入的最小电流强度为多少?
图 1.03
导体棒 ab 在重力、静摩擦力、弹力、安培力四力作用下平衡,由图 2 中所示电流方向,可知导
体棒所受安培力水平向右。当导体棒所受安培力较大时,导体棒所受静摩擦力沿导轨向下,当导体
棒所受安培力较小时,导体棒所受静摩擦力沿导轨向上。
(1)ab 中通入最大电流强度时受力分析如图 2,此时最大静摩擦力 沿斜面向下,建立
直角坐标系,由 ab 平衡可知,x 方向:
y 方向: 由以上各式联立解得:
°= 37θ
50.0=µ
2/10 smg =
Nf FF µ=
)sincos(
sincosmax
θθµ
θθµ
+=
+=
N
NN
F
FFF
)sin(cossincos θµθθµθ −=−= NNN FFFmg
ABL
FILBIF
NmgF
5.16,
6.6sincos
sincos
max
maxmaxmax
max
===
=−
+=
有
θµθ
θθµ
(2)通入最小电流时,ab 受力分析如图 3 所示,此时静摩擦力 ,方向沿斜面向上,
建立直角坐标系,由平衡有:
x 方向:
y 方向:
联立两式解得:
由
2. 物体置于光滑的斜面上,当斜面固定时,物体沿斜面下滑的加速度为 ,斜面对物体的弹力为
。斜面不固定,且地面也光滑时,物体下滑的加速度为 ,斜面对物体的弹力为 ,则
下列关系正确的是:
A. B.
C. D.
当斜面可动时,对物体来说是相对斜面这个加速参考系在作加速运动,而且物体和参考系的运动
方向不在同一条直线上,利用常规的方法难于判断,但是利用矢量三角形法则能轻松获解。
如图 4 所示,由于重力的大小和方向是确定不变的,斜面弹力的方向也是惟一的,由共点力合成
的三角形法则,斜面固定时,加速度方向沿斜面向下,作出的矢量图如实线所示,当斜面也运动时,
物体并不沿平行于斜面方向运动,相对于地面的实际运动方向如虚线所示。所以正确选项为 B。
Nf FF '' µ=
)cos(sin'cos'sin'min θµθθµθ −=−= NNN FFFF
)cossin('cos'sin' θθµθθµ +=+= NNN FFFmg
NmgF 6.0cossin
cossin
min =+
−= θθµ
θµθ
ABL
FILBIF 5.1, min
minminmin ===
1a
1NF 2a 2NF
2121 , NN FFaa >> 2121 , NN FFaa ><
2121 , NN FFaa << 2121 , NN FFaa <>
3. 带负电的小物体在倾角为 的绝缘斜面上,整个斜面处于范围足够大、方向水平向
右的匀强电场中,如图 1.04 所示。物体 A 的质量为 m,电量为-q,与斜面间的动摩擦因素为 ,
它在电场中受到的电场力的大小等于重力的一半。物体 A 在斜面上由静止开始下滑,经时间 t
后突然在斜面区域加上范围足够大的匀强磁场,磁场方向与电场强度方向垂直,磁感应强度大
小为 B,此后物体 A 沿斜面继续下滑距离 L 后离开斜面。
(1)物体 A 在斜面上的运动情况?说明理由。
(2)物体 A 在斜面上运动过程中有多少能量转化为内能?(结果用字母表示)
图 1.04
(1)物体 A 在斜面上受重力、电场力、支持力和滑动摩擦力的作用,<1>小物体 A 在恒力作用下,
先在斜面上做初速度为零的匀加速直线运动;<2>加上匀强磁场后,还受方向垂直斜面向上的洛伦兹
力作用,方可使 A 离开斜面,故磁感应强度方向应垂直纸面向里。随着速度的增加,洛伦兹力增大,
斜面的支持力减小,滑动摩擦力减小,物体继续做加速度增大的加速运动,直到斜面的支持力变为
零,此后小物体 A 将离开地面。
(2)加磁场之前,物体 A 做匀加速运动,据牛顿运动定律有:
解出
)6.0(sin =θθ
µ
NfN
f
FFmgqEF
maFqEmg
µθθ
θθ
==−+
=−+
,0cossin
cossin
又
2
)2( µ−= ga
A 沿斜面运动的距离为:
加上磁场后,受到洛伦兹力
随速度增大,支持力 减小,直到 时,物体 A 将离开斜面,有:
物体 A 在斜面上运动的全过程中,重力和电场力做正功,滑动摩擦力做负功,洛伦兹力不做功,
根据动能定理有:
物体 A 克服摩擦力做功,机械能转化为内能:
4. 如图 1.05 所示,在水平地面上有一辆运动的平板小车,车上固定一个盛水的杯子,杯子的直径
为 R。当小车作匀加速运动时,水面呈如图所示状态,左右液面的高度差为 h,则小车的加速度
方向指向如何?加速度的大小为多少?
图 1.05
我们由图可以看出物体运动情况,根据杯中水的形状,可以构建这样的一个模型,一个物块放在
光滑的斜面上(倾角为 ),重力和斜面的支持力的合力提供物块沿水平方向上的加速度,其加速度
为: 。
4
)2(
2
1 2
2 tgats
µ−==
BqvF =洛
NF 0=NF
qB
mgv
qEmgBqv
2
sincos
=
−=
解出
θθ
02
1cos)(sin)( 2 −=−+++ mvWsLqEsLmg fθθ
22
232
84
)2(
Bq
gmLtgmgW f −
+−⋅= µ
α
αtanga =
我们取杯中水面上的一滴水为研究对象,水滴受力情况如同斜面上的物块。由题意可得,取杯中
水面上的一滴水为研究对象,它相对静止在“斜面”上,可以得出其加速度为 ,而
,得 ,方向水平向右。
5. 如图 1.06 所示,质量为 M 的木板放在倾角为 的光滑斜面上,质量为 m 的人在木板上跑,假如
脚与板接触处不打滑。
(1)要保持木板相对斜面静止,人应以多大的加速度朝什么方向跑动?
(2)要保持人相对于斜面的位置不变,人在原地跑而使木板以多大的加速度朝什么方向运动?
图 1.06
答案:(1)要保持木板相对斜面静止,木板要受到沿斜面向上的摩擦力与木板的下滑力平衡,
即 ,根据作用力与反作用力人受到木板对他沿斜面向下的摩擦力,所以人受到的合力
为:
方向沿斜面向下。
(2)要保持人相对于斜面的位置不变,对人有 ,F 为人受到的摩擦力且沿斜面向
上 , 根 据 作 用 力 与 反 作 用 力 等 值 反 向 的 特 点 判 断 木 板 受 到 沿 斜 面 向 下 的 摩 擦 力 , 大 小 为
所以木板受到的合力为:
方向沿斜面向下。
αtanga =
R
h=αtan R
gha =
θ
FMg =θsin
m
Mgmga
maFmg
θθ
θ
sinsin
sin
+=
=+
Fmg =θsin
Fmg =θsin
M
Mgmga
MaFMg
θθ
θ
sinsin
sin
+=
=+
解得
四、挂件模型
1. 图 1.07 中重物的质量为 m,轻细线 AO 和 BO 的 A、B 端是固定的。平衡时 AO 是水平的,BO
与水平面的夹角为θ。AO 的拉力 F1 和 BO 的拉力 F2 的大小是( )
A. B.
C. D.
图 1.07
解析:以“结点”O 为研究对象,沿水平、竖直方向建立坐标系,在水平方向有 竖
直方向有 联立求解得 BD 正确。
2. 物体 A 质量为 ,用两根轻绳 B、C 连接到竖直墙上,在物体 A 上加一恒力 F,若图 1.08
中力 F、轻绳 AB 与水平线夹角均为 ,要使两绳都能绷直,求恒力 F 的大小。
图 1.08
解析:要使两绳都能绷直,必须 ,再利用正交分解法作数学讨论。作出 A 的受
力分析图 3,由正交分解法的平衡条件:
θcos1 mgF = θcot1 mgF =
θsin2 mgF = θsin2
mgF =
12 cos FF =θ
mgF =θsin2
kgm 2=
°= 60θ
00 21 ≥≥ FF ,
图 3
①
②
解得 ③
④
两绳都绷直,必须
由以上解得 F 有最大值 ,解得 F 有最小值 ,所以 F 的取值为
。
3. 如图 1.09 所示,AB、AC 为不可伸长的轻绳,小球质量为 m=0.4kg。当小车静止时,AC 水平,
AB 与竖直方向夹角为θ=37°,试求小车分别以下列加速度向右匀加速运动时,两绳上的张力
FAC、FAB 分别为多少。取 g=10m/s2。
(1) ;(2) 。
图 1.09
解析:设绳 AC 水平且拉力刚好为零时,临界加速度为
0sinsin 1 =−+ mgFF θθ
0coscos 12 =−− θθ FFF
FmgF −= θsin1
θθ cotcos22 mgFF −=
00 21 ≥≥ FF ,
NF 1.23max = NF 6.11min =
NFN 1.236.11 ≤≤
2
1 /5 sma = 2
2 /10 sma =
0a
根据牛顿第二定律
联立两式并代入数据得
当 ,此时 AC 绳伸直且有拉力。
根 据 牛 顿 第 二 定 律 ; , 联 立 两 式 并 代 入 数 据 得
当 ,此时 AC 绳不能伸直, 。
AB 绳与竖直方向夹角 ,据牛顿第二定律 , 。联立两
式并代入数据得 。
4. 两个相同的小球 A 和 B,质量均为 m,用长度相同的两根细线把 A、B 两球悬挂在水平天花板
上的同一点 O,并用长度相同的细线连接 A、B 两小球,然后用一水平方向的力 F 作用在小球 A
上,此时三根细线均处于直线状态,且 OB 细线恰好处于竖直方向,如图 1 所示,如果不考虑小
球的大小,两球均处于静止状态,则力 F 的大小为( )
A. 0 B. mg C. D.
图 1.10
答案:C
5. 如图 1.11 甲所示,一根轻绳上端固定在 O 点,下端拴一个重为 G 的钢球 A,球处于静止状态。
现对球施加一个方向向右的外力 F,使球缓慢偏移,在移动中的每一刻,都可以认为球处于平衡
状态,如果外力 F 方向始终水平,最大值为 2G,试求:
(1)轻绳张力 FT 的大小取值范围;
(2)在乙图中画出轻绳张力与 cosθ的关系图象。
mgFmaF ABAB == θθ cossin 0,
2
0 /5.7 sma =
0
2
1 /5 asma <=
1sin maFF ACAB =−θ mgFAB =θcos
NFNF ACAB 15 == ,
0
2
2 /10 asma >= 0' =ACF
θα > 2sin' maF AB =α mgF AB =αcos'
NF AB 7.5' =
mg3 3
3mg
图 1.11
答案:(1)当水平拉力 F=0 时,轻绳处于竖直位置时,绳子张力最小
当水平拉力 F=2G 时,绳子张力最大:
因此轻绳的张力范围是:
(2)设在某位置球处于平衡状态,由平衡条件得
所以 即 ,得图象如图 7。
图 7
6. 如图 1.12 所示,斜面与水平面间的夹角 ,物体 A 和 B 的质量分别为 、
。两者之间用质量可以不计的细绳相连。求:
(1)如 A 和 B 对斜面的动摩擦因数分别为 , 时,两物体的加速度各为多大?
GFT =1
GGGFT 5)2( 22
2 =+=
GFG T 5≤≤
GFT =θcos
θcos
GFT = θcos
1∝TF
θ = 30 m kgA = 10
m kgB = 5
µ A = 0 6. µ B = 0 2.
绳的张力为多少?
(2)如果把 A 和 B 位置互换,两个物体的加速度及绳的张力各是多少?
(3)如果斜面为光滑时,则两个物体的加速度及绳的张力又各是多少?
图 1.12
解析:(1)设绳子的张力为 ,物体 A 和 B 沿斜面下滑的加速度分别为 和 ,根据牛顿
第二定律:
对 A 有
对 B 有
设 ,即假设绳子没有张力,联立求解得 ,因 ,故
说 明 物 体 B 运 动 比 物 体 A 的 运 动 快 , 绳 松 弛 , 所 以 的 假 设 成 立 。 故 有
因 而 实 际 不 符 , 则 A 静 止 。
(2)如 B 与 A 互换则 ,即 B 物运动得比 A 物快,所以 A、B
之间有拉力且共速,用整体法
代入数据求出 ,用隔离法对 B: 代入数据求出
(3)如斜面光滑摩擦不计,则 A 和 B 沿斜面的加速度均为 两物间无作用
力。
FT a A aB
m g F m g m aA T A A A Asin cosθ µ θ− − =
m g F m g m aB T B B B Bsin cosθ µ θ+ − =
FT = 0 g a aA B B Acos ( )θ µ µ− = − µ µA B>
a aB A>
FT = 0
a g m sA A= − = −(sin cos ) . /θ µ θ 0196 2
a g m sB B= − =(sin cos ) . /θ µ θ 327 2
g a aA B B Acos ( )θ µ µ− = − > 0
m g m g m g m g m m aA B A A B B A Bsin sin cos cos ( )θ θ µ θ µ θ+ − − = +
a m s= 0 96 2. / m g m g F m aB B B T Bsin cosθ µ θ− − =
F NT = 115.
a g m s= =sin /θ 5 2
7. 如图 1.13 所示,固定在小车上的支架的斜杆与竖直杆的夹角为 、在斜杆下端固定有质量为 m
的小球,下列关于杆对球的作用力 F 的判断中,正确的是( )
A. 小车静止时, ,方向沿杆向上
B. 小车静止时, ,方向垂直杆向上
C. 小车向右以加速度 a 运动时,一定有
D. 小车向左以加速度 a 运动时, ,方向
斜向左上方,与竖直方向的夹角为 图 1.13
解析:小车静止时,由物体的平衡条件知杆对球的作用力方向竖直向上,且大小等于球的重力
mg。
小车向右以加速度 a 运动,设小球受杆的作用力方向与竖直方向的夹角为 ,如图 4 所示,根据
牛顿第二定律有: , ,两式相除得: 。
图 4
只 有 当 球 的 加 速 度 且 向 右 时 , 杆 对 球 的 作 用 力 才 沿 杆 的 方 向 , 此 时 才 有
。小车向左以加速度 a 运动,根据牛顿第二定律知小球所受重力 mg 和杆对球的作用
力 F 的合力大小为 ma,方向水平向左。根据力的合成知 ,方向斜向左上方,
与竖直方向的夹角为:
8. 如图 1.14 所示,在动力小车上固定一直角硬杆 ABC,分别系在水平直杆 AB 两端的轻弹簧和细
线将小球 P 悬吊起来。轻弹簧的劲度系数为 k,小球 P 的质量为 m,当小车沿水平地面以加速度
θ
F mg= sinθ
F mg= cosθ
F ma= / sinθ
F ma mg= +( ) ( )2 2
α = arctan( / )a g
α
F masinα = F mgcosα = tan /α = a g
a g= tanθ
F ma= / sinθ
F ma mg= +( ) ( )2 2
α = arctan( / )a g
a 向右运动而达到稳定状态时,轻弹簧保持竖直,而细线与杆的竖直部分的夹角为 ,试求此时
弹簧的形变量。
图 1.14
答案: , ,
,讨论:
①若 则弹簧伸长
②若 则弹簧伸长
③若 则弹簧压缩
θ
F maT sinθ = F F mgT cosθ + = F kx=
x m g a k= −( cot ) /θ
a g< tanθ x m g a k= −( cot ) /θ
a g= tanθ x = 0
a g> tanθ x m a g k= −( cot ) /θ
五、弹簧模型(动力学)
1. 如图 1.15 所示,四个完全相同的弹簧都处于水平位置,它们的右端受到大小皆为 F 的拉力作用,
而左端的情况各不相同:①中弹簧的左端固定在墙上。②中弹簧的左端受大小也为 F 的拉力作
用。③中弹簧的左端拴一小物块,物块在光滑的桌面上滑动。④中弹簧的左端拴一小物块,物
块在有摩擦的桌面上滑动。若认为弹簧的质量都为零,以 l1、l2、l3、l4 依次表示四个弹簧的伸长
量,则有( )
① ②
③ ④
图 1.15
A. B. C. D.
解析:当弹簧处于静止(或匀速运动)时,弹簧两端受力大小相等,产生的弹力也相等,用其中
任意一端产生的弹力代入胡克定律即可求形变。当弹簧处于加速运动状态时,以弹簧为研究对象,
由于其质量为零,无论加速度 a 为多少,仍然可以得到弹簧两端受力大小相等。由于弹簧弹力
与施加在弹簧上的外力 F 是作用力与反作用的关系,因此,弹簧的弹力也处处相等,与静止情况没
有区别。在题目所述四种情况中,由于弹簧的右端受到大小皆为 F 的拉力作用,且弹簧质量都为零,
根据作用力与反作用力关系,弹簧产生的弹力大小皆为 F,又由四个弹簧完全相同,根据胡克定律,
它们的伸长量皆相等,所以正确选项为 D。
2. 用如图 1.16 所示的装置可以测量汽车在水平路面上做匀加速直线运动的加速度。该装置是在矩
形箱子的前、后壁上各安装一个由力敏电阻组成的压力传感器。用两根相同的轻弹簧夹着一个
质量为 2.0kg 的滑块,滑块可无摩擦的滑动,两弹簧的另一端分别压在传感器 a、b 上,其压力
大小可直接从传感器的液晶显示屏上读出。现将装置沿运动方向固定在汽车上,传感器 b 在前,
传感器 a 在后,汽车静止时,传感器 a、b 的示数均为 10N(取 )
l l2 1> l l4 3> l l1 3> l l2 4=
F弹
g m s= 10 2/
(1)若传感器 a 的示数为 14N、b 的示数为 6.0N,求此时汽车的加速度大小和方向。
(2)当汽车以怎样的加速度运动时,传感器 a 的示数为零。
图 1.16
解析:(1) ,
a1 的方向向右或向前。
(2)根据题意可知,当左侧弹簧弹力 时,右侧弹簧的弹力
代入数据得 ,方向向左或向后
3. 如图 1.17 所示,一根轻弹簧上端固定在 O 点,下端系一个钢球 P,球处于静止状态。现对球施
加一个方向向右的外力 F,吏球缓慢偏移。若外力 F 方向始终水平,移动中弹簧与竖直方向的夹
角 且弹簧的伸长量不超过弹性限度,则下面给出弹簧伸长量 x 与 的函数关系图象
中,最接近的是( )
图 1.17
答案:D
F F ma1 2 1− = a F F
m m s1
1 2 24 0= − = . /
F1 0'= F N2 20'=
F ma2 2'=
a F
m m s2
2 210= =' /
θ < 90 cosθ
第二章 圆周运动
解题模型:
一、水平方向的圆盘模型
1. 如图 1.01 所示,水平转盘上放有质量为 m 的物块,当物块到转轴的距离为 r 时,连接物块和转
轴的绳刚好被拉直(绳上张力为零)。物体和转盘间最大静摩擦力是其正压力的μ倍,求:
(1)当转盘的角速度 时,细绳的拉力 。
(2)当转盘的角速度 时,细绳的拉力 。
图 2.01
解析:设转动过程中物体与盘间恰好达到最大静摩擦力时转动的角速度为 ,则 ,
解得 。
(1)因为 ,所以物体所需向心力小于物体与盘间的最大摩擦力,则物与盘间
还未到最大静摩擦力,细绳的拉力仍为 0,即 。
(2)因为 ,所以物体所需向心力大于物与盘间的最大静摩擦力,则细绳将对
物体施加拉力 ,由牛顿的第二定律得: ,解得 。
2. 如图 2.02 所示,在匀速转动的圆盘上,沿直径方向上放置以细线相连的 A、B 两个小物块。A
的质量为 ,离轴心 ,B 的质量为 ,离轴心 ,A、B 与
盘面间相互作用的摩擦力最大值为其重力的 0.5 倍,试求:
ω µ
1 2
= g
r FT1
ω µ
2
3
2
= g
r FT2
ω 0 µ ωmg m r= 0
2
ω µ
0 = g
r
ω µ ω1 02
= g
r
FT2 F mg m rT2 2
2+ =µ ω F mg
T2 2
= µ
m kgA = 2 r cm1 20= m kgB = 1 r cm2 10=
(1)当圆盘转动的角速度 为多少时,细线上开始出现张
力?
(2)欲使 A、B 与盘面间不发生相对滑动,则圆盘转动的最大
角速度为多大?( )
图 2.02
(1)当圆盘转动的角速度 为多少时,细线上开始出现张力?
(2)欲使 A、B 与盘面间不发生相对滑动,则圆盘转动的最大角速度为多大?( )
解析:(1) 较小时,A、B 均由静摩擦力充当向心力, 增大, 可知,它们受到
的静摩擦力也增大,而 ,所以 A 受到的静摩擦力先达到最大值。 再增大,AB 间绳子开始
受到拉力。
由 ,得:
(2) 达到 后, 再增加,B 增大的向心力靠增加拉力及摩擦力共同来提供,A 增大的向
心力靠增加拉力来提供,由于 A 增大的向心力超过 B 增加的向心力, 再增加,B 所受摩擦力逐渐
减小,直到为零,如 再增加,B 所受的摩擦力就反向,直到达最大静摩擦力。如 再增加,就不
能维持匀速圆周运动了,A、B 就在圆盘上滑动起来。设此时角速度为 ,绳中张力为 ,对 A、
B 受力分析:
对 A 有
对 B 有
联立解得:
ω 0
g m s= 10 2/
ω 0
g m s= 10 2/
ω ω F m r= ω 2
r r1 2> ω
F m rfm = 1 0
2
2ω
ω 0
1 1
1
1 1
05 5= = =F
m r
m g
m r rad sfm . /
ω ω 0 ω
ω
ω ω
ω 1 FT
F F m rfm T1 1 1
2
1+ = ω
F F m rT fm− =2 2 1
2
2ω
ω 1
1 2
1 1 2 2
5 2 7 07= +
− = =F F
m r m r rad s rad sfm fm / . /
3. 如 图 2.03 所 示 , 两 个 相 同 材 料 制 成 的 靠 摩 擦 传 动 的 轮 A 和 轮 B 水 平 放 置 , 两 轮 半 径
,当主动轮 A 匀速转动时,在 A 轮边缘上放置的小木块恰能相对静止在 A 轮边缘上。
若将小木块放在 B 轮上,欲使木块相对 B 轮也静止,则木块距 B 轮转轴的最大距离为( )
A. B. C. D.
图 2.03
答案:C
R RA B= 2
RB
4
RB
3
RB
2 RB
二、行星模型
1. 已知氢原子处于基态时,核外电子绕核运动的轨道半径 ,则氢原子处于量子数
1、2、3,核外电子绕核运动的速度之比和周期之比为:( )
A. ;
B.
C.
D. 以上答案均不对
解析:根据经典理论,氢原子核外电子绕核作匀速率圆周运动时,由库仑力提供向心力。
即 ,从而得
线速度为
周期为
又根据玻尔理论,对应于不同量子数的轨道半径 与基态时轨道半径 r1 有下述关系式:
。
由以上几式可得 v 的通式为:
所以电子在第 1、2、3 不同轨道上运动速度之比为:
而周期的通式为:
mr 10
1 105.0 −×=
=n
3:2:1:: 321 =vvv 333
321 1:2:3:: =TTT
33
321321 3:2:1::;3
1:2
1:1:: == TTTvvv
33321321 3
1:2
1:1::;2:3:6:: == TTTvvv
r
vmr
ke 2
2
2
=
mr
kev =
v
rT
π2=
nr
1
2rnrn =
n
v
mr
k
n
evn
1
1
==
2:3:63
1:2
1:1:: 321 ==vvv
所以,电子在第 1、2、3 不同轨道上运动周期之比为:
由此可知,只有选项 B 是正确的。
2. 卫星做圆周运动,由于大气阻力的作用,其轨道的高度将逐渐变化(由于高度变化很缓慢,变
化过程中的任一时刻,仍可认为卫星满足匀速圆周运动的规律),下述卫星运动的一些物理量的
变化正确的是:( )
A. 线速度减小 B. 轨道半径增大 C. 向心加速度增大 D. 周期增大
解析:假设轨道半径不变,由于大气阻力使线速度减小,因而需要的向心力减小,而提供向心力
的万有引力不变,故提供的向心力大于需要的向心力,卫星将做向心运动而使轨道半径减小,由于
卫 星 在 变 轨 后 的 轨 道 上 运 动 时 , 满 足 , 故 增 大 而 T 减 小 , 又
,故 a 增大,则选项 C 正确。
3. 经过用天文望远镜长期观测,人们在宇宙中已经发现了许多双星系统,通过对它们的研究,使
我们对宇宙中物质的存在形式和分布情况有了较深刻的认识,双星系统由两个星体组成,其中
每个星体的线度都远小于两星体之间的距离,一般双星系统距离其他星体很远,可以当作孤立
系统来处理。现根据对某一双星系统的光度学测量确定;该双星系统中每个星体的质量都是 M,
两者相距 L,它们正围绕两者连线的中点做圆周运动。
(1)试计算该双星系统的运动周期 ;
(2)若实验中观测到的运动周期为 ,且 。
为了理解 与 的不同,目前有一种流行的理论认为,在宇宙中可能存在一种望远镜观测
不到的暗物质。作为一种简化模型,我们假定在以这两个星体连线为直径的球体内均匀分布这种暗
1
3
1
13
1
1
2 2
/22 Tnv
rnnv
rn
v
rT ==== πππ
333
321 3:2:1:: =TTT
32 rTr
GMv ∝= 和 v
2r
GM
m
Fa == 引
计算T
观测T )1(:1: >= NNTT 计算观测
观测T 计算T
物质。若不考虑其他暗物质的影响,请根据这一模型和上述观测结果确定该星系间这种暗物质的密
度。
答案:(1)双星均绕它们连线的中点做圆周运动,设运动的速率为 v,得:
(2)根据观测结果,星体的运动周期:
这种差异是由双星系统(类似一个球)内均匀分布的暗物质引起的,均匀分布双星系统内的暗物
质对双星系统的作用,与一个质点(质点的质量等于球内暗物质的总质量 且位于中点 O 处)的
作用相同。考虑暗物质作用后双星的速度即为观察到的速度 ,则有:
因为周长一定时,周期和速度成反比,得:
有以上各式得
设所求暗物质的密度为 ,则有
GM
LLv
LT
L
GMvL
GM
L
vM
22/2
2,
2
2
22
ππ ==
==
计算
计算计算观测 TT
N
T <= 1
'M
1v
L
MMGvL
MMGL
GM
L
vM 2
)'4(,)2/(
'
2
122
22
1 +=+=
vNv
111
1
⋅=
MNM 4
1'
−=
ρ
3
3
2
)1(3
4
1)2(3
4
L
MN
MNL
πρ
ρπ
−=
−=
故
第三章 功和能
一、水平方向的弹性碰撞
1. 在光滑水平地面上有两个相同的弹性小球 A、B,质量都为 m,现 B 球静止,A 球向 B 球运动,
发生正碰。已知碰撞过程中总机械能守恒,两球压缩最紧时的弹性势能为 EP,则碰前 A 球的速
度等于( )
A. B. C. D.
解析:设碰前 A 球的速度为 v0,两球压缩最紧时的速度为 v,根据动量守恒定律得出 ,
由能量守恒定律得 ,联立解得 ,所以正确选项为 C。
2. 在原子核物理中,研究核子与核子关联的最有效途径是“双电荷交换反应”。这类反应的前半部
分过程和下述力学模型类似,两个小球 A 和 B 用轻质弹簧相连,在光滑的水平直轨道上处于静
止状态,在它们左边有一垂直于轨道的固定挡板 P,右边有一小球 C 沿轨道以速度 v0 射向 B 球,
如图 3.01 所示,C 与 B 发生碰撞并立即结成一个整体 D,在它们继续向左运动的过程中,当弹
簧长度变到最短时,长度突然被锁定,不再改变,然后,A 球与挡板 P 发生碰撞,碰后 A、D 都
静止不动,A 与 P 接触而不粘连,过一段时间,突然解除锁定(锁定及解除锁定均无机械能损
失),已知 A、B、C 三球的质量均为 m。
图 3.01
(1)求弹簧长度刚被锁定后 A 球的速度。
(2)求在 A 球离开挡板 P 之后的运动过程中,弹簧的最大弹性势能。
解析:(1)设 C 球与 B 球粘结成 D 时,D 的速度为 v1,由动量守恒得 当弹
簧压至最短时,D 与 A 的速度相等,设此速度为 v2,由动量守恒得 ,由以上两式求得
m
EP
m
EP2
m
EP2 m
EP22
mvmv 20 =
22
0 )2(2
1
2
1 vmEmv P +=
m
Ev P20 =
10 )( vmmmv +=
21 32 mvmv =
A 的速度 。
( 2 ) 设 弹 簧 长 度 被 锁 定 后 , 贮 存 在 弹 簧 中 的 势 能 为 EP , 由 能 量 守 恒 , 有
撞击 P 后,A 与 D 的动能都为零,解除锁定后,当弹簧刚恢复到自然长
度时,势能全部转弯成 D 的动能,设 D 的速度为 v3,则有
以后弹簧伸长,A 球离开挡板 P,并获得速度,当 A、D 的速度相等时,弹簧伸至最长,设此
时的速度为 v4,由动量守恒得
当弹簧伸到最长时,其势能最大,设此势能为 EP',由能量守恒,有
解以上各式得 。
3. 图 3.02 中,轻弹簧的一端固定,另一端与滑块 B 相连,B 静止在水平直导轨上,弹簧处在原长
状态。另一质量与 B 相同滑块 A,从导轨上的 P 点以某一初速度向 B 滑行,当 A 滑过距离 l1 时,
与 B 相碰,碰撞时间极短,碰后 A、B 紧贴在一起运动,但互不粘连。已知最后 A 恰好返回出
发点 P 并停止,滑块 A 和 B 与导轨的滑动摩擦因数都为 ,运动过程中弹簧最大形变量为 l2,
重力加速度为 g,求 A 从 P 出发的初速度 v0。
图 3.02
解析:令 A、B 质量皆为 m,A 刚接触 B 时速度为 v1(碰前)
由功能关系,有
A、B 碰撞过程中动量守恒,令碰后 A、B 共同运动的速度为 v2
有
碰后 A、B 先一起向左运动,接着 A、B 一起被弹回,在弹簧恢复到原长时,设 A、B 的共同
02 3
1 vv =
PEmvmv +⋅=⋅ 2
2
2
1 32
122
1
2
3)2(2
1 vmEP ⋅=
43 32 mvmv =
'32
122
1 2
4
2
3 PEmvmv +⋅=⋅
2
036
1' mvEP =
µ
1
2
1
2
0 2
1
2
1 mglmvmv µ=−
21 2mvmv =
速度为 v3,在这一过程中,弹簧势能始末状态都为零,利用功能关系,有
此后 A、B 开始分离,A 单独向右滑到 P 点停下,由功能关系有
由以上各式,解得
4. 用轻弹簧相连的质量均为 2kg 的 A、B 两物块都以 的速度在光滑水平地面上运动,弹
簧处于原长,质量为 4kg 的物体 C 静止在前方,如图 3.03 所示,B 与 C 碰撞后二者粘在一起运
动。求在以后的运动中,
(1)当弹簧的弹性势能最大时物体 A 的速度多大?
(2)弹性势能的最大值是多大?
(3)A 的速度有可能向左吗?为什么? 图 3.03
解析:(1)当 A、B、C 三者的速度相等时弹簧的弹性势能最大,由于 A、B、C 三者组成的
系统动量守恒,有
解得:
(2)B、C 碰撞时 B、C 组成的系统动量守恒,设碰后瞬间 B、C 两者速度为 ,则
设物块 A 速度为 vA 时弹簧的弹性势能最大为 EP,根据能量守恒
(3)由系统动量守恒得
设 A 的速度方向向左, ,则
)2()2()2(2
1)2(2
1
2
2
3
2
2 lgmvmvm µ=−
1
2
32
1 mglmv µ=
)1610( 210 llgv += µ
smv /6=
ACBABA v)mmm(v)mm( ++=+
smvA /3=
'v
smvvmmvm CBB /2'')( =+= ,
JvmmmvmvmmE ACBAACBP 12)(2
1
2
1')(2
1 222 =++−++=
BCBAABA vmmvmvmvm )( ++=+
0
则作用后 A、B、C 动能之和
实际上系统的机械能
根据能量守恒定律, 是不可能的。故 A 不可能向左运动。
JvmmvmE BCBAAk 48)(2
1
2
1 22 >++=
JvmmmEE ACBAP 48)(2
1' 2 =+++=
'EEk >
5. 如图 3.04 所示,在光滑水平长直轨道上,A、B 两小球之间有一处于原长的轻质弹簧,弹簧右端
与 B 球连接,左端与 A 球接触但不粘连,已知 ,开始时 A、B 均静止。在
A 球的左边有一质量为 的小球 C 以初速度 向右运动,与 A 球碰撞后粘连在一起,成为一
个复合球 D,碰撞时间极短,接着逐渐压缩弹簧并使 B 球运动,经过一段时间后,D 球与弹簧
分离(弹簧始终处于弹性限度内)。
图 3.04
(1)上述过程中,弹簧的最大弹性势能是多少?
(2)当弹簧恢复原长时 B 球速度是多大?
(3)若开始时在 B 球右侧某位置固定一块挡板(图中未画出),在 D 球与弹簧分离前使 B 球与
挡板发生碰撞,并在碰后立即将挡板撤走,设 B 球与挡板碰撞时间极短,碰后 B 球速度
大小不变,但方向相反,试求出此后弹簧的弹性势能最大值的范围。
答案:(1)设 C 与 A 相碰后速度为 v1,三个球共同速度为 v2 时,弹簧的弹性势能最大,由动
量守恒,能量守恒有:
(2)设弹簧恢复原长时,D 球速度为 ,B 球速度为
则有
(3)设 B 球与挡板相碰前瞬间 D、B 两球速度
mmmm BA 22
== ,
m2
1
0v
2
0
2
2
2
1max
0220
0110
12
132
1
2
1
6
1232
1
2
112
1
mvmvmvE
vvvmmv
vvvmmv
p =⋅−=
=><⋅=
=><⋅=
3v 4v
><⋅+=
><+=
422
1
2
1
2
1
32
2
4
2
3
2
1
431
mvmvmv
mvmvmv
33
2
63
1 0
14
0
13
vvvvvv ==−=−= ,
65 vv 、
><+= 522
1
650 mvmvmv
与挡板碰后弹性势能最大,D、B 两球速度相等,设为
当 时, 最大
时, 最小,
所以
'v
><=− 6'32 65 mvmvmv
24
)4(
8
36
)4(
2
3
8
'32
1)2(2
1'
6
4
3
22
3
2
3
2'
2
05
2
0
2
05
2
0
220
05
0
55
0
5
65
vvmmv
vvmmv
vmvmE
vv
vvvvvvvv
P
−−=
−×−=
××−××=
−=
−
=
+−
=−=
4
0
5
vv = 'PE 8'
2
0
max
mvEP =
6
0
5
vv −= 'PE 108'
2
0
min
mvEP =
8'108
2
0
2
0 mvEmv
P ≤≤
二、水平方向的非弹性碰撞
1. 如图 3.05 所示,木块与水平弹簧相连放在光滑的水平面上,子弹沿水平方向射入木块后留在木
块内(时间极短),然后将弹簧压缩到最短。关于子弹和木块组成的系统,下列说法真确的是
A. 从子弹开始射入到弹簧压缩到最短的过程中系统动量守恒
B. 子弹射入木块的过程中,系统动量守恒
C. 子弹射入木块的过程中,系统动量不守恒
D. 木块压缩弹簧的过程中,系统动量守恒
图 3.05
答案:B
2. 如图 3.06 所示,一个长为 L、质量为 M 的长方形木块,静止在光滑水平面上,一个质量为 m 的
物块(可视为质点),以水平初速度 从木块的左端滑向右端,设物块与木块间的动摩擦因数为
,当物块与木块达到相对静止时,物块仍在长木块上,求系统机械能转化成内能的量 Q。
图 3.06
解析:可先根据动量守恒定律求出 m 和 M 的共同速度,再根据动能定理或能量守恒求出转化为
内能的量 Q。
对物块,滑动摩擦力 做负功,由动能定理得:
即 对物块做负功,使物块动能减少。
对木块,滑动摩擦力 对木块做正功,由动能定理得 ,即 对木块做正功,使
木块动能增加,系统减少的机械能为:
0v
µ
fF
2
0
2
2
1
2
1)( mvmvsdF tf −=+−
fF
fF 2
2
1 MvsFf = fF
本题中 ,物块与木块相对静止时, ,则上式可简化为:
又以物块、木块为系统,系统在水平方向不受外力,动量守恒,则:
联立式<2>、<3>得:
故系统机械能转化为内能的量为:
3. 如图 3.07 所示,光滑水平面地面上放着一辆两端有挡板的静止的小车,车长 L=1m,一个大小
可忽略的铁块从车的正中央以速度 向右沿车滑行。铁块与小车的质量均等于 m,它们
之间的动摩擦因数 ,铁块与挡板碰撞过程中机械能不损失,且碰撞时间可以忽略不计,
取 ,求从铁快由车的正中央出发到两者相对静止需经历的时间。
图 3.07
答案:
4. 如图 3.08 所示,电容器固定在一个绝缘座上,绝缘座放在光滑水平面上,平行板电容器板间的
距离为 d,右极板上有一小孔,通过孔有一左端固定在电容器左极板上的水平绝缘光滑细杆,电
容器极板以及底座、绝缘杆总质量为 M,给电容器充电后,有一质量为 m 的带正电小环恰套在
杆上以某一初速度 v0 对准小孔向左运动,并从小孔进入电容器,设带电环不影响电容器板间电
场分布。带电环进入电容器后距左板的最小距离为 0.5d,试求:
(1)带电环与左极板相距最近时的速度 v;
><=−+=−− 1)(2
1
2
1
2
1 222
0 dFsFsdFMvmvmv ffft
mgFf µ= vvt =
><+−= 2)(2
1
2
1 22
0 tvMmmvmgdµ
><+= 3)(0 tvMmmv
)(2
2
0
mMg
Mvd += µ
)(2)(2
2
0
2
0
mM
Mmv
mMg
MvmgdFQ f +=+⋅== µµ
0 5 /v m s=
0.05µ =
210 /g m s=
0
2
2.5 / 5 /
0.05 10 /
tv v m s m st a m s
− −= = ×
v0
(2)此过程中电容器移动的距离 s。
(3)此过程中能量如何变化?
图 3.08
答案:(1)带电环进入电容器后在电场力的作用下做初速度为 v0 的匀减速直线运动,而电容器
则在电场力的作用下做匀加速直线运动,当它们的速度相等时,带电环与电容器的左极板相距最近,
由系统动量守恒定律可得:
动量观点:
力与运动观点:
设电场力为 F
(2)能量观点(在第(1)问基础上):
对 m:
对 M:
所以
运动学观点:
对 M: ,对 m:
,解得:
带电环与电容器的速度图像如图 5 所示。由三角形面积可得:
mM
mvvvmMmv +=+= 0
0 )( ,
mM
mvvvtM
Ftm
Fv +===− 0
0 ,
2
0
2
2
1
2
1)2( mvmvdsEq −=+⋅−
02
1 2 −= MvEqs
2
0
2
2
1)(2
1
2 mvvMmdEq −+=−
2
d
mM
ms ⋅+=
stv =
2 '2
0 stvv =+
2' dss =−
)(2 mM
mds +=
图 5
解得:
(3)在此过程,系统中,带电小环动能减少,电势能增加,同时电容器等的动能增加,系统中
减少的动能全部转化为电势能。
三、人船模型
1. 如图 3.09 所示,长为 L、质量为 M 的小船停在静水中,质量为 m 的人从静止开始从船头走到船
尾,不计水的阻力,求船和人对地面的位移各为多少?
图 3.09
解析:以人和船组成的系统为研究对象,在人由船头走到船尾的过程中,系统在水平方向不受外
力作用,所以整个系统在水平方向动量守恒。当人起步加速前进时,船同时向后做加速运动;人匀
速运动,则船匀速运动;当人停下来时,船也停下来。设某时刻人对地的速度为 v,船对地的速度
为 v',取人行进的方向为正方向,根据动量守恒定律有: ,即
因为人由船头走到船尾的过程中,每一时刻都满足动量守恒定律,所以每一时刻人的速度与船的
速度之比,都与它们的质量之比成反比。因此人由船头走到船尾的过程中,人的平均速度 v 与船的
平均速度 v 也与它们的质量成反比,即 ,而人的位移 ,船的位移 ,所以船
000 2
1
2
1
2 vtstvd == ,
)(2 mM
mds +=
0'=− Mvmv M
m
v
v ='
M
m
v
v = tvs =人 tvs =船
的位移与人的位移也与它们的质量成反比,即
<1>式是“人船模型”的位移与质量的关系,此式的适用条件:原来处于静止状态的系统,在系
统发生相对运动的过程中,某一个方向的动量守恒。由图 1 可以看出:
由<1><2>两式解得
2. 如图 3.10 所示,质量为 M 的小车,上面站着一个质量为 m 的人,车以 v0 的速度在光滑的水平
地面上前进,现在人用相对于小车为 u 的速度水平向后跳出后,车速增加Δv,则计算Δv 的式
子正确的是:( )
A.
B.
C.
D. 图 3.10
答案:CD
3. 如图 3.11 所示,一排人站在沿 x 轴的水平轨道旁,原点 O 两侧的人的序号都记为 n(n=1,2,
3,…),每人只有一个沙袋,x>0 一侧的沙袋质量为 14 千克,x<0 一侧的沙袋质量为 10 千克。
一质量为 M=48 千克的小车以某初速度从原点出发向正 x 方向滑行。不计轨道阻力。当车每经
过一人身旁时,此人就把沙袋以水平速度 u 朝与车速相反的方向沿车面扔到车上,u 的大小等于
扔此袋之前瞬间车速大小的 2n 倍(n 是此人的序号数)。
图 3.11
(1) 空车出发后,车上堆积了几个沙袋时车就反向滑行?
><= 1M
m
s
s
人
船
><=+ 2Lss 人船
LmM
msLmM
Ms +=+= 船人 ,
muvvMvmM −∆+=+ )()( 00
)()()( 000 vumvvMvmM −−∆+=+
)]([)()( 000 vvumvvMvmM ∆+−−∆+=+
)(0 vumvM ∆−−∆=
12 31 23 0…… ……
(2) 车上最终会有几个沙袋?
(1)在小车朝正 x 方向滑行的过程中,第(n-1)个沙袋扔到车上后的车速为 vn-1,第 n 个沙袋扔
到车上后的车速为 vn,由动量守恒定律有
小车反向运动的条件是 vn-1>0,vn<0,即
M-nm>0 ②
M-(n+1)m<0 ③
代入数字,得
n 应为整数,故 n=3,即车上堆积 3 个沙袋后车就反向滑行.
(2)车自反向滑行直到接近 x<0 一侧第 1 人所在位置时,车速保持不变,而车的质量为
M+3m.若在朝负 x 方向滑行过程中,第(n-1)个沙袋扔到车上后车速为 vn-1′,第 n 个沙袋扔到
车上后车速为 vn′,现取在图中向左的方向(负 x 方向)为速度 vn′、vn-1′的正方向,则由动量
守恒定律有
车不再向左滑行的条件是
vn-1′>0,vn′≤0
即 M+3m-nm′>0 ⑤
M+3m-(n+1)m′≤0 ⑥
n=8 时,车停止滑行,即在 x<0 一侧第 8 个沙袋扔到车上后车就停住.故车上最终共有大
小沙袋 3+8=11 个.
四、爆炸反冲模型
1. 如图 3.12 所示海岸炮将炮弹水平射出,炮身质量(不含炮弹)为 M,每颗炮弹质量为 m,当炮
身固定时,炮弹水平射程为 s,那么当炮身不固定时,发射同样的炮弹,水平射程将是多少?
图 3.12
解析:两次发射转化为动能的化学能 E 是相同的。第一次化学能全部转化为炮弹的动能;第二次
化学能转化为炮弹和炮身的动能,而炮弹和炮身水平动量守恒,由动能和动量的关系式 知,
在 动 量 大 小 相 同 的 情 况 下 , 物 体 的 动 能 和 质 量 成 反 比 , 炮 弹 的 动 能
,由于平抛的射高相等,两次射程的比等于抛出时初速
度之比,即: ,所以 。
思考:有一辆炮车总质量为 M,静止在水平光滑地面上,当把质量为 m 的炮弹沿着与水平面成θ
角发射出去,炮弹对地速度为 ,求炮车后退的速度。
提示:系统在水平面上不受外力,故水平方向动量守恒,炮弹对地的水平速度大小为 ,
设炮车后退方向为正方向,则
m
pEk 2
2
=
EmM
MmvEEmvE +==== 2
22
2
11 2
1
2
1 ,
mM
M
v
v
s
s
+==
1
22
mM
Mss 2 +=
0v
θcos0v
mM
mvvmvvmM −==−− θθ cos0cos)( 0
0 ,
2. 在光滑地面上,有一辆装有平射炮的炮车,平射炮固定在炮车上,已知炮车及炮身的质量为 M,
炮弹的质量为 m;发射炮弹时,炸药提供给炮身和炮弹的总机械能 E0 是不变的。若要使刚发射
后炮弹的动能等于 E0,即炸药提供的能量全部变为炮弹的动能,则在发射前炮车应怎样运动?
答案:若在发射前给炮车一适当的初速度 v0,就可实现题述的要求。
在这种情况下,用 v 表示发射后炮弹的速度,V 表示发射后炮车的速度,由动量守恒可知:
由能量关系可知:
按题述的要求应有
由以上各式得:
><+=+ 1)( 0 MVmvvMm
><+=++ 22
1
2
1)(2
1 22
0
2
0 MVmvEvMm
><= 32
1
0
2 Emv
><+
+++=
+−+
=
4)(
))((2
)()(
2
0
0
0
mMm
mMMmMmE
MmMMm
mEv
第四章 力学综合
一、解题模型:
1. 如图 5.01 所示,一路灯距地面的高度为 h,身高为 的人以速度 v 匀速行走。
(1)试证明人的头顶的影子作匀速运动;
(2)求人影的长度随时间的变化率。
图 5.01
解:(1)设 t=0 时刻,人位于路灯的正下方 O 处,在时刻 t,人走到 S 处,根据题意有 OS=vt,
过路灯 P 和人头顶的直线与地面的交点 M 为 t 时刻人头顶影子的位置,如图 2 所示。OM 为人头顶
影子到 O 点的距离。
图 2
由几何关系,有
联立解得
因 OM 与时间 t 成正比,故人头顶的影子作匀速运动。
(2)由图 2 可知,在时刻 t,人影的长度为 SM,由几何关系,有 SM=OM-OS,由以上各式得
可见影长 SM 与时间 t 成正比,所以影长随时间的变化率 。
2. 一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为 2mm 的均匀狭缝。将激
l
OSOM
l
OM
h
−=
tlh
hvOM −=
tlh
lvSM −=
lh
lvk −=
光器与传感器上下对准,使二者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地
沿圆盘半径方向匀速移动,激光器连续向下发射激光束。在圆盘转动过程中,当狭缝经过激光
器与传感器之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线。
图 5.02(a)为该装置示意图,图 5.02(b)为所接收的光信号随时间变化的图线,横坐标表示时
间,纵坐标表示接收到的激光信号强度,图中 。
(1)利用图(b)中的数据求 1s 时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度△t3。
图 5.02
解析:(1)由图线读得,转盘的转动周期 ,
角速度
(2)激光器和探测器沿半径由中心向边缘移动(理由为:由于脉冲宽度在逐渐变窄,表明光信
号能通过狭缝的时间逐渐减少,即圆盘上对应探测器所在位置的线速度逐渐增加,因此激光器和探
测器沿半径由中心向边缘移动)。
(3)设狭缝宽度为 d,探测器接收到第 i 个脉冲时距转轴的距离为 ri,第 i 个脉冲的宽度为△ti,
激光器和探测器沿半径的运动速度为 v。
由以上式联立解得
stst 3
2
3
1 108.0100.1 −− ×=∆×=∆ ,
sT 8.0=
sradsradT /85.7/8.0
28.62 === πω
)11(2)11(2
2
23
23
12
12
1223
tt
dTrrtt
dTrr
vTrrrrTr
dt
i
i
∆−∆=−∆−∆=−
=−=−=∆
ππ
π
,
,
stt
ttt 3
21
21
3 1067.02
−×=∆−∆
∆∆=∆
3. 如图 5.03 是某种静电分选器的原理示意图。两个竖直放置的平行金属板带有等量异号电荷,形
成匀强电场,分选器漏斗的出口与两板上端处于同一高度,到两板距离相等。混合在一起的 a、
b 两种颗粒从漏斗出口下落时,a 种颗粒带上正电,b 种颗粒带上负电。经分选电场后,a、b 两
种颗粒分别落到水平传送带 A、B 上。已知两板间距 d=0.1m,板的度 ,电场仅局限在
平行板之间;各颗粒所带电量大小与其质量之比均为 。设颗粒进入电场时的初速
度为零,分选过程中颗粒大小及颗粒间的相互作用力不计。要求两种颗粒离开电场区域时,不
接触到极板但有最大偏转量。重力加速度 g 取 。
(1)左右两板各带何种电荷?两极板间的电压多大?
(2)若两带电平行板的下端距传送带 A、B 的高度 H=0.3m,颗粒落至传送带时的速度大小是多
少?
(3)设颗粒每次与传送带碰撞反弹时,沿竖直方向的速度大小为碰撞前竖直方向速度大小的一半。
写出颗粒第 n 次碰撞反弹高度的表达式。并求出经过多少次碰撞,颗粒反弹的高度小于
0.01m。
图 5.03
解析:(1)左板带负电荷,右板带正电荷。依题意,颗粒在平行板间的竖直方向上满足
在水平方向上满足:
两式联立得
(2)根据动能定理,颗粒落到水平传送带上满足
ml 5.0=
kgC /101 5−×
2/10 sm
2
2
1 gtl =
2
2
1
2 tdm
Uqds ==
Vlq
gmdU 4
2
1012
×==
(3)在竖直方向颗粒作自由落体运动,它第一次落到水平传送带上沿竖直方向的速度
反弹高度
根据题设条件,颗粒第 n 次反弹后上升的高度:
当 时,
4. 侦察卫星在通过地球两极上空的圆轨道上运行,它的运行轨道距地面高为 h,要使卫星在一天的
时间内将地面上赤道各处在日照条件下的情况全部都拍摄下来,卫星在通过赤道上空时,卫星
上的摄影像机至少应拍地面上赤道圆周的弧长是多少?设地球半径为 R,地面处的重力加速度为
g,地球自转的周期为 T。
解析:设卫星周期为 T1,那么:
①
又 ②
有 ③
地球自转角速度为 ④
在卫星绕行地球一周的时间 T1 内,地球转过的圆心角为 ⑤
那么摄像机转到赤道正上方时摄下圆周的弧长为 ⑥
smHlgm
Uqv
mvHlmgUq
/4)(2
2
1)(2
1 2
≈++=
=++
smHlgv /4)(21 =+=
)2)(4
1(2
)5.0( 2
1
2
1
1 g
v
g
vh ==
mg
vh nn
n 8.0)4
1()2()4
1(
2
1 ×==
4=n mhn 01.0<
)(4
)( 2
1
2
2 hRTmhR
MmG +=+
π
mgR
MmG =
2
g
Rh
RT
3
1
)(2 += π
T
πω 2=
11
2 TTT
πωθ ==
Rs θ=
由①②③④⑤⑥得
5. 如图 5.04 所示,一对杂技演员(都视为质点)乘秋千(秋千绳处于水平位置)从 A 点由静止出
发绕 O 点下摆,当摆到最低点 B 时,女演员在极短时间内将男演员沿水平方向推出,然后自己
刚好能回到高处 A。求男演员落地点 C 与 O 点的水平距离 s。已知男演员质量 m1 和女演员质量
m2 之比 ,秋千的质量不计,摆长为 R,C 点比 O 点低 5R。
图 5.04
解析:设分离前男女演员在秋千最低点 B 的速度为 ,由机械能守恒定律,
设刚分离时男演员速度的大小为 ,方向与 相同;女演员速度的大小为 ,方向与 相反,
由动量守恒,
分离后,男演员做平抛运动,设男演员从被推出到落在 C 点所需的时间为 t,根据题给条件,
由运动学规律,
根据题给条件,女演员刚好回 A 点,由机械能守恒定律, ,已知 ,
由以上各式可得 。
6. 在广场游玩时,一个小孩将一充有氢气的气球用细绳系于一个小石块上,并将小石块放置于水
平地面上。已知小石块的质量为 ,气球(含球内氢气)的质量为 ,气球体积为 V,空气密
度为ρ(V 和ρ均视作不变量),风沿水平方向吹,风速为 v。已知风对气球的作用力
(式中 k 为一已知系数,u 为气球相对空气的速度)。开始时,小石块静止在地面上,如图 5.05
g
Rh
Ts
32 )(4 += π
2
2
1 =
m
m
0v
2
02121 )(2
1)( vmmgRmm +=+
1v 0v 2v 0v
2211021 )( vmvmvmm −=+
tvsgtR 1
2
2
14 == ,
2
222 2
1 vmgRm = 21 2mm =
Rs 8=
1m 2m
kuf =
所示。
(1)若风速 v 在逐渐增大,小孩担心气球会连同小石块一起被吹离地面,试判断是否会出现这一
情况,并说明理由。
(2)若细绳突然断开,已知气球飞上天空后,在气球所经过的空间中的风速 v 保持不变量,求气
球能达到的最大速度的大小。
图 5.05
答案:(1)将气球和小石块作为一个整体;在竖直方向上,气球(包括小石块)受到重力 G、
浮力 F 和地面支持力 FN 的作用,据平衡条件有:
由于式中 FN 是与风速 v 无关的恒力,而 ,故气球连同小石块不会一起被吹离地面。
(2)气球的运动可分解成水平方向和竖直方向的两个分运动,达到最大速度时气球在水平方向
做匀速运动,有
气球在竖直方向做匀速运动,有:
气球的最大速度:
联立求解得:
gVgmmFN ρ−+= )( 21
0>NF
vvx =
gVkvgm y ρ=+2
22
yxm vvv +=
222 )( k
gmgVvvm
−+= ρ
二、滑轮模型
1. 如图 5.06 所示,将一根不可伸长、柔软的轻绳左、右两端分别系于 A、B 两点上,一物体用动
滑轮悬挂在轻绳上,达到平衡时,两段绳子间的夹角为 ,绳子张力为 ;将绳子右端移到 C
点,待系统达到平衡时,两段绳子间的夹角为 ,绳子张力为 ;将绳子右端再由 C 点移到 D
点,待系统达到平衡时,两段绳子间的夹角为 ,绳子张力为 ,不计摩擦,并且 BC 为竖直
线,则( )
A. B.
C. D.
图 5.06
解析:由于跨过滑轮上绳上各点的张力相同,而它们的合力与重力为一对平衡力,所以从 B 点移
到 C 点的过程中,通过滑轮的移动, ,再从 C 点移到 D 点, 肯定大于 ,由
于竖直方向上必须有 ,所以 。故只有 A 选项正确。
2. 如图 5.07 所示在车厢中有一条光滑的带子(质量不计),带子中放上一个圆柱体,车子静止时带
子两边的夹角∠ACB=90°,若车厢以加速度 a=7.5m/s2 向左匀加速运动,则带子的两边与车厢
顶面夹角分别为多少?
图 5.07
1θ 1F
2θ 2F
3θ 3F
321 θθθ <= 321 θθθ ==
321 FFF >> 321 FFF >=
2121 FF == ,θθ 3θ 2θ
mgF =
2cos2
θ
23 FF >
解析:设车静止时 AC 长为 ,当小车以 向左作匀加速运动时,由于 AC、BC 之间
的类似于“滑轮”,故受到的拉力相等,设为 FT,圆柱体所受到的合力为 ma,在向左作匀加速,运
动中 AC 长为 ,BC 长为
由几何关系得
由牛顿运动定律建立方程:
代入数据求得
3. 如图 5.08 所示,细绳绕过两个定滑轮 A 和 B,在两端各挂一个重为 P 的物体,现在 A、B 的中
点 C 处挂一个重为 Q 的小球,Q<2P,求小球可能下降的最大距离 h。已知 AB 的长为 2L,不计
滑轮和绳之间的摩擦力及绳的质量。
图 5.08
解析:选小球 Q 和两重物 P 构成的整体为研究对象,该整体的速率从零开始逐渐增为最大,紧
接着从最大又逐渐减小为零(此时小球下降的距离最大为 h),如图 4 在整个过程中,只有重力做功
机械能守恒。
l 2/5.7 sma =
ll ∆+ ll ∆−
lllll 2
sinsinsin γβα =∆+=∆−
mgFFmaFF TTTT =+=− βαβα sinsincoscos ,
°=°= 9319 βα ,
图 4
因重为 Q 的小球可能下降的最大距离为 h,所以重为 P 的两物体分别上升的最大距离均为
。
考虑到整体初、末位置的速率均为零,故根据机械能守恒定律知,重为 Q 的小球重力势能的减
少量等于重为 P 的两个物体重力势能的增加量,即 。
从而解得
4. 如图 5.09 轻绳 AD 跨过固定在水平横梁 BC 右端的定滑轮挂住一个质量为 M1 的物体。∠
ACB=30°;图(b)中轻杆 HG 一端用铰链固定在竖直墙上,另一端 G 通过细绳 EG 拉住,EG
与水平方向也成 30°,轻杆的 G 点用细绳 GF 拉住一个质量为 M2 的物体,求细绳 AC 段的张力
FTAC 与细绳 EG 的张力 FTEG 之比?
图 4.09
图 5.09
解析:图(a)中绳 AC 段的拉力 FTAC=M1g
图(b)中由于 FTEGsin30°=M2g,解得:
LLh −+ 22
)(2 22 LLhPQh −+=
224
4
QP
PLQh −=
2
1
2M
M
F
F
TEG
TAC =
5. 如图 5.10 所示,质量分别为 M 和 m(M>m)的小物体用轻绳连接;跨放在半径为 R 的光滑半
圆柱体和光滑定滑轮 B 上,m 位于半圆柱体底端 C 点,半圆柱体顶端 A 点与滑轮 B 的连线水平。
整个系统从静止开始运动。设 m 能到达圆柱体的顶端,试求:
(1)m 到达圆柱体的顶端 A 点时,m 和 M 的速度。
(2)m 到达 A 点时,对圆柱体的压力。
图 5.10
答案:(1)
(2)
2)(2
1
2
1 vmMmgRRMg +=−π
mM
mgRRMgv +
−= 2π
NFmgR
mv −=
2
mM
gmMmgmgFN +
−−=
22π
mgmM
mMmM
+
+−+= 2π
三、渡河模型
1. 如图 5.11 所示,人用绳子通过定滑轮以不变的速度 拉水平面上的物体 A,当绳与水平方向成θ
角时,求物体 A 的速度。
图 5.11
解:本题的关键是正确地确定物体 A 的两个分运动。物体 A 的运动(即绳的末端的运动)可看
作两个分运动的合成:一是沿绳的方向被牵引,绳长缩短。绳长缩短的速度即等于 ;二是随
着绳以定滑轮为圆心的摆动,它不改变绳长,只改变角度θ的值。这样就可以将 按图示方向进行
分解。所以 及 实际上就是 的两个分速度,如图所示,由此可得 。
2. 如图 5.12 所示,某人通过一根跨过定滑轮的轻绳提升一个质量为 m 的重物,开始时人在滑轮的
正下方,绳下端 A 点离滑轮的距离为 H。人由静止拉着绳向右移动,当绳下端到 B 点位置时,
人的速度为 v,绳与水平面夹角为θ。问在这个过程中,人对重物做了多少功?
解析:人移动时对绳的拉力不是恒力,重物不是做匀速运动也不是做匀变速运动,故无法用
0v
01 vv =
Av
1v 2v Av θθ coscos
01 vvvA ==
图 5.12
求对重物做的功,需从动能定理的角度来分析求解。
当绳下端由 A 点移到 B 点时,重物上升的高度为:
重力做功的数值为:
当绳在 B 点实际水平速度为 v 时,v 可以分解为沿绳斜向下的分速度 和绕定滑轮逆时针转动的
分速度 ,其中沿绳斜向下的分速度 和重物上升速度的大小是一致的,从图中可看出:
以重物为研究对象,根据动能定理得:
3. 一条宽度为 L 的河,水流速度为 ,已知船在静水中速度为 ,那么:
(1)怎样渡河时间最短?
(2)若 ,怎样渡河位移最小?
(3)若 ,怎样渡河船漂下的距离最短?
解析:(1)小船过河问题,可以把小船的渡河运动分解为它同时参与的两个运动,一是小船运
动,一是水流的运动,船的实际运动为合运动。如图 4 所示。设船头斜向上游与河岸成任意角θ。
这时船速在垂直于河岸方向的速度分量为 ,渡河所需要的时间为 ,
可以看出:L、v 船一定时,t 随 sinθ增大而减小;当 时, (最大)。所以,船头与
河岸垂直 。
θcosFsW =
θ
θ
θ sin
)sin1(
sin
−=−= HHHh
θ
θ
sin
)sin1( −= mgHWG
1v
2v 1v
θcos1 vv =
02
1 2
1 −=− mvWW G人
2
cos
sin
)sin1( 22 θ
θ
θ mvmgHW +−=人
水v 船v
水船 vv >
水船 vv <
θsin1 船vv = θsin1 船v
L
v
Lt ==
°= 90θ 1sin =θ
船v
Lt =min
图 4
(2)如图 5 所示,渡河的最小位移即河的宽度。为了使渡河位移等于 L,必须使船的合速度 v
的方向与河岸垂直,即使沿河岸方向的速度分量等于 0。这时船头应指向河的上游,并与河岸成一
定的角度θ,所以有 ,即 。
图 5
因为 ,所以只有在 时,船才有可能垂直河岸渡河。
(3)若 ,则不论船的航向如何,总是被水冲向下游,怎样才能使漂下的距离最短呢?
如图 6 所示,设船头 v 船与河岸成θ角。合速度 v 与河岸成α角。可以看出:α角越大,船漂下
的距离 x 越短,那么,在什么条件下α角最大呢?以 v 水的矢尖为圆心,v 船为半径画圆,当 v 与圆
相切时,α角最大,根据
图 6
水船 vv =θcos
船
水
v
varccos=θ
1cos0 ≤≤ θ 水船 vv >
水船 vv <
水
船
v
v=θcos
船头与河岸的夹角应为 ,船沿河漂下的最短距离为:
此时渡河的最短位移:
4. 小河宽为 d,河水中各点水流速度大小与各点到较近河岸边的距离成正比, ,
x 是各点到近岸的距离,小船船头垂直河岸渡河,小船划水速度为 ,则下列说法中正确的是
( )
A. 小船渡河的轨迹为曲线
B. 小船到达离河岸 处,船渡河的速度为
C. 小船渡河时的轨迹为直线
D. 小船到达离河岸 处,船的渡河速度为
答案:A
水
船
v
varccos=θ
θθ
sin)cos(min
船
船水 v
Lvvx ⋅−=
船
水
v
LvLs == θcos
d
vkkxv 04== ,水
0v
2
d
02v
4/3d 010v
第五章 电路
解题模型:
一、电路的动态变化
1. 如图 6.01 所示电路中,当滑动变阻器的滑片 P 向左移动时,各表(各电表内阻对电路的影响均
不考虑)的示数如何变化?为什么?
图 6.01
解析:这是一个由局部变化而影响整体的闭合电路欧姆定律应用的动态分析问题。对于这类问题,
可遵循以下步骤:先弄清楚外电路的串、并联关系,分析外电路总电阻怎样变化;由 确定
闭合电路的电流强度如何变化;再由 确定路端电压的变化情况;最后用部分电路的欧姆
定律 及分流、分压原理讨论各部分电阻的电流、电压变化情况。
当滑片 P 向左滑动, 减小,即 减小,根据 判断总电流增大,A1 示数增大;
路端电压的判断由内而外,根据 知路端电压减小,V 示数减小;
对 R1,有 所以 增大, 示数增大;
对并联支路, ,所以 减小, 示数减小;
对 R2,有 ,所以 I2 减小,A2 示数减小。
rR
EI +=
IrEU −=
IRU =
3R 总R rR
EI +=
总
总
IrEU −=
11 RIU 总= 1U 1V
12 UUU −= 2U 2V
2
2
2 R
UI =
2. 用伏安法测一节干电池的电动势和内电阻,伏安图象如图 6.02 所示,根据图线回答:
(1)干电池的电动势和内电阻各多大?
(2)图中 a 点对应的外电路电阻是多大?电源此时内部热功率 是
多少?
(3)图中 a、b 两点对应的外电路电阻之比是多大?对应的输出 功
率之比是多大?
(4)在此实验中,电源最大输出功率是多大?
图 6.02
解析:
(1)开路时(I=0)的路端电压即电源电动势,因此 ,内电阻
也可由图线斜率的绝对值即内阻,有:
(2)a 点对应外电阻
此时电源内部的热耗功率:
也可以由面积差求得:
(3)电阻之比:
VE 5.1=
Ω=Ω== 2.05.7
5.1
短I
Er
Ω=Ω−= 2.05.2
0.15.1r
Ω=Ω== 4.05.2
0.1
a
a
a I
UR
WWrIP ar 25.12.05.2 22 =×==
WWUIEIP aaar 25.1)0.15.1(5.2 =−×=−=
1
4
0.5/5.0
5.2/0.1 =Ω
Ω=
b
a
R
R
输出功率之比:
(4)电源最大输出功率出现在内、外电阻相等时,此时路端电压 ,干路电流 ,
因而最大输出功率
当然直接用 计算或由对称性找乘积 IU(对应于图线上的面积)的最大值,也可以求
出此值。
3. 如图 6.03 所示电路中,R2、R3 是定值电阻,R1 是滑动变阻器,当 R1 的滑片 P 从中点向右端滑
动时,各个电表的示数怎样变化?
图 6.03
4. 如图 6.04 所示电路由 8 个不同电阻组成,已知 R1=12Ω其余电阻阻值未知,测得 A、B 间的总
电阻为 4Ω。今将 R1 换成 6Ω的电阻,则 A、B 间的总电阻变
为 。
图 6.04
1
1
0.55.0
5.20.1 =×
×=
W
W
P
P
b
a
2
EU =
2
短II =
WWP m 81.22
5.7
2
5.1 =×=出
r
EP m 4
2
=出
1V
1A2A
3V
2V
1R
2R
3R
5. 如图 6.05 所示的电路中,S 接通,两电源的电动势都为 3V,内阻都为 lΩ,R1=2Ω,R2= 4Ω,C
=10μF.求:
(1)电容器两端的电压多大?
(2)现断开 S,从此时起,到电容器两端电压稳定时止,通过 R2
上的电量为多少?
图 6.05
6. 如图 6.06 所示,R3=6Ω,电源内阻 r 为 1Ω,当 K 合上且 R2 为 2Ω
时,电源的总功率为 16W,而电源的输出功率为 12W,灯泡正常 发光,
求:
(1)电灯的电阻及功率。
(2)K 断开时,为使灯泡正常发光,R2 的阻值应调到多少欧?
图 6.06
解:(1)P 内耗=I2r=4W,I=2A ε= V ,IL=1A
(2)
7. 如图 6.07 所示的电路中,电池的电动势ε=5 伏,内电阻 r=10 欧 ,
8=
I
p
3
3
1IrI AR
ε −= =
3L L
L
R r RI
ε= − − = Ω
固定电阻 R=90 欧,R0 是可变电阻,在 R0 由零增加到 400 欧的过程中,求:
(1)可变电阻 R0 消耗功率最大的条件和最大热功率。
(2)电池的内电阻 r 和固定电阻 R 上消耗的最小热功率之和。
图 6.07
解:(1)由等效内阻法,当 R0=R+r=(90+10)Ω=100Ω时,可变电阻 R0 上消耗的功率最大,且
(2)电流最小即 R0 取最大值 400Ω时,定值电阻 r 和 R 上消耗的电功率最小,且最小功率
8. 如图图 6.08 所示, 微法, 微法, 欧, 欧,当开关 S 断开时,A、B 两点电压
当 S 闭合时,C1 的电量是增加还是减少?改变了多少库仑?已知 伏。
图 6.08
解:在电路中,C1、C2 的作用是断路,当 S 断开时,全电路无电流,B、C 等势,A、D 等势,则
伏。
C1 所带的电量为 (库)
WrRP 0625.0)(4
2
max =+= ε
WrRrRRP 01.0)(
2
0
max =+
++= ε
61 =C 32 =C 61 =R 32 =R
?=ABU 18=U
18=== CDACAB UUU
46
11 1008.118106 −− ×=××== CDUCQ
S 闭合时,电路由 串联,C1 两端的电压即 R1 上两端的电压, (伏)
C1 的带电量 (库)
故 C1 的带电量改变了 (库),负号表示减少。
9. 把一个 10V,2.0W 的用电器 A(纯电阻)接到某一电动势和内阻都不变的电源上.用电器 A 实际消
耗的功率是 2.0 瓦,换上另一个 10V,5.0W 的用电器 B(纯电阻)接到这一电源上,问电器 B 实际
消耗的功率有没有可能反而小于 2.0 瓦?你如果认为不可能,试说明理由;如果认为可能,试
求出用电器 B 实际消耗的功率小于 2.0 瓦的条件(设电阻不随温度改变)。
解 根据 A,B 的额定电压和额定功率可求出它们的电阻分别为
根据闭合电路欧姆定律可得出,把 A,B 用电器分别接到电源上,所消耗的功率分别为
于是根据题中给出的条件 PA=2.0 瓦,PB<2.0 瓦,即得出
把上式联立求解,得出电源电动势 ε 和内阻 r 满足条件是
10.电饭锅是一种可以自动煮饭并自动保温,又不会把饭烧焦的家用电器。它的电路由控制部分 AB
和工作部分 BC 组成。K1 是限温开关,手动闭合,当温度达到 1030C 时自动断开,不能自动闭合。
K2 是自动开关,当温度超过 800C 时自动断开,温度低于 700C 时自动闭合。R2 是限流电阻,阻值 2140
Ω,R1 是工作电阻,阻值 60Ω。锅中放好适量的米和水,插上电源(220V,50HZ),手动闭合 K1
后,电饭锅就能自动煮好米饭并保温。
⑴简述手动闭合 K1 后,电饭锅加热、保温过程的工作原理。
R R1 2、 12636
18
1
21
=+=+= RRR
UU AC
46
11 1072.012106 −− ×=××==′ ACUCQ
444
11 1036.01008.11072.0 −−− ×−=×−×=−′=∆ QQQ
Ω== 50
2
.
A
A
A P
UR
Ω== 20
2
.
B
B
B P
UR
A
A
A RrRP
2
+= ε
B
B
B RrRP
2
+= ε
0.25050
2
=×
+ r
ε
0.22020
2
<×
+ r
ε
Vr
V
1010505
10210
>−=
+>
ε
ε
⑵加热过程电饭锅消耗的电功率 P1 是多大?K1、K2 都断开时电饭锅消耗的功率 P2 是多大?
⑶若插上电源后没有手动闭合 K1,能煮熟饭吗?为什么?
解答:⑴插上电源,手动闭合 K1 后由于室温肯定低于 700C 所以当时 K2 也是闭合的,所以 R2 被
短路,只有 R1 工作,功率 P1 较大,使米和水被加热,当温度升到 800C 时 K2 断开,但 K1 仍闭合,R2
仍被短路,功率仍为 P1,所以温度继续升高,把水烧开,这时温度将保持在 1000C 直到水分蒸发完
毕,温度继续升高到 1030C,K1 断开且不再自动闭合,这时饭已煮好,R1、R2 串联,热功率 P2 较小,
电饭锅发出的电热小于它向外释放的热,温度开始降低,当温度降低到 700C 时,K2 自动闭合,功率
又变为 P1,使饭的温度升高,到 800C 时 K2 自动断开,温度又开始降低……如此使电饭锅处于保温状
态,直到关闭电源。
⑵P1=U2/R1=807W,P2=U2/(R1+R2)=22W
⑶若 K1 未闭合,开始 K2 总是闭合的,R2 被短路,功率为 P1,当温度上升到 800C 时,K2 自动断开,
功率降为 P2,温度降低到 700C,K2 自动闭合……温度只能在 700C~800C 之间变化,不能把水烧开,
不能煮熟饭。
二、交变电流
1. 有一正弦交流电源,电压有效值 U=120V,频率为 f=50Hz 向一霓虹灯供电,若霓虹灯的激发电
压和熄灭电压均为 U0=60 V,试估算在一个小时内,霓虹灯发光时间有多长?为什么人眼不
能感到这种忽明忽暗的现象?
解析:由正弦交流电的最大值与有效值 U 的关系得:Um=120 V
设 t=0 时交流电的瞬时电压 U=0 则交流电的瞬时表达式为
U=120 sin100 t V
如图所示,画出一个周期内交流电的 U-t 图象,其中阴影部分对应
的时间 t1 表示霓虹灯不能发光的时间,根据对称性,一个周期内霓虹灯不能发光的时间为 4t1,
当 U=U0=60 V 时,由上式得 t1=1/600s,再由对称性求得一个周期内能发光的时间:t=T-4t1=
2
2
2 π
2
再由比例关系求得一小时内霓虹灯发光的时间为:t=
很明显霓虹灯在工作过程中是忽明忽暗的,而熄灭的时间只有 1/300s(如图 t2 时刻到 t3 时刻)
由于人的眼睛具有视觉暂留现象,而这个视觉暂留时间约 1/16s 为远大于 1/300s,因此经过灯光刺激
的人眼不会因为短暂的熄灭而有所感觉。
2. 把一电容器 C 接在 220V 的交流电路中,为了保证电容不被击穿,电容器 C 的耐压值是多少?
解析:不低于 200 V,不少学生往把电容器与灯泡类比,额定电压 220 V 的灯泡接在 220 V
的交流电源上正常发光.从而错误的认为电容器的耐压值也只要不低于 220V 即可,事实上,电容器
接在交流电路中一直不断地进行充、放电过程.电容器两极间电压最大可达 200 V,故电容器 C
的耐压值应不低于 200 V.
3. 如图 6.09 所示,两平行导轨与水平面间的倾角为 ,电阻不计,间距 L=0.3m,长度足够
长,导轨处于磁感应强度 B=1T,方向垂直于导轨平面向上的匀强磁场中.导轨两端各接一个阻
值为 R0=2Ω电阻,另一横跨在导轨间的金属棒质量 m=1kg,电阻 r=1Ω棒与导轨间的滑动摩
擦因数 μ=0.5,当金属棒以平行于导轨的向上初速度 υ0=10m/s
上滑,直至上升到最高点过程中,通过上端电阻电量 =0.1C
(g 取 10m/s2),求上端电阻 R0 产生的焦耳热?
s75
1
s240075
1
501
3600 =×
2
2
2
°= 37θ
q∆
图 6.09
解析:设棒沿斜面能上升的最大距离为 s,磁感应强度 B 垂直斜面向上,则等效电路和导体棒受
力分析分别如图(1)、(2)所示.由图可知, 在
棒上升过程中,通过棒某一截面的电量应为 2
.由 = 得
而 ∴s= m
设电路各电阻消耗的总焦耳热为
= R
从金属棒开始运动到最高点过程,利用能量守恒关系有
+μmgcosθ·s+mgsinθ·s=
R = =5J
此题中,求电阻产生的焦耳热 应该用电流的有效值计算,由于 无法求,因此只能通
过能量关系求得 .
4. 一闭合线圈在匀强磁场中做匀角速转动,线圈转速为 240rad/min ,当线圈平面转动至与磁场平
行时,线圈的电动势为 2.0V 。设线圈从垂直磁场瞬时开始计时,试求:
(1)该线圈电动势的瞬时表达式;
(2)电动势在 s 末的瞬时值。
q∆
t
qI ∆
∆= 2
rR
E
+
2
0
)2(2 0 rR
t
qE +∆
∆=
t
BLs
tq ∆=∆
∆= ϕ
2)( 0 =+∆
BL
rRq
总Q
总Q QtRItRItrRI 662
3)2()2( 0
2
00
2
0
02 =∆=∆=∆+总 0
总Q 2
02
1 mv
Q 0 6
1
总Q
Q II ≠有
Q
48
1
(1) (2)
答案:(1)2sin8πtV 、(2)1.0V
5. 如图 6.10 所示,匀强磁场的磁感强度 B = 0.1T ,矩形线圈的匝数 N = 100 匝,边长 = 0.2m ,
= 0.5m ,转动角速度ω= 100πrad/s ,转轴在正中间。试求:
(1)从图示位置开始计时,该线圈电动势的瞬时表达式;
(2)当转轴移动至 ab 边(其它条件不变),再求电动势的瞬时表达式;
(3)当线圈作成半径为 r = 的圆形,再求电动势的瞬时表达式。
图 6.10
答案:(1)314cos100πtV 、(2)不变、(3)不变。
ab
bc
π/1.0
第六章 电磁场
解题模型:
一、电磁场中的单杆模型
1. 如图 7.01 所示, ,电压表与电流表的量程分别为 0~10V 和 0~3A,电表
均为理想电表。导体棒 ab 与导轨电阻均不计,且导轨光滑,导轨平面水平,ab 棒处于匀强磁场
中。
(1)当变阻器 R 接入电路的阻值调到 30 ,且用 =40N 的水平拉力向右拉 ab 棒并使之达到
稳定速度 时,两表中恰好有一表满偏,而另一表又能安全使用,则此时 ab 棒的速度
是多少?
(2)当变阻器 R 接入电路的阻值调到 ,且仍使 ab 棒的速度达到稳定时,两表中恰有一表满
偏,而另一表能安全使用,则此时作用于 ab 棒的水平向右的拉力 F2 是多大?
图 7.01
解析:(1)假设电流表指针满偏,即 I=3A,那么此时电压表的示数为 U= =15V,电压表
示数超过了量程,不能正常使用,不合题意。因此,应该是电压表正好达到满偏。
当电压表满偏时,即 U1=10V,此时电流表示数为
设 a、b 棒稳定时的速度为 ,产生的感应电动势为 E1,则 E1=BLv1,且 E1=I1(R1+R 并)=20V
a、b 棒受到的安培力为
F1=BIL=40N
Ω6=Ω= 21 5 RR ,
Ω F1
v1 v1
3Ω
IR并
I U
R A1
1 2= =
并
v1
解得
(2)利用假设法可以判断,此时电流表恰好满偏,即 I2=3A,此时电压表的示数为
=6V 可以安全使用,符合题意。
由 F=BIL 可知,稳定时棒受到的拉力与棒中的电流成正比,所以
。
2. 如图 7.02 甲所示,一个足够长的“U”形金属导轨 NMPQ 固定在水平面内,MN、PQ 两导轨间
的宽为 L=0.50m。一根质量为 m=0.50kg 的均匀金属导体棒 ab 静止在导轨上且接触良好,abMP
恰好围成一个正方形。该轨道平面处在磁感应强度大小可以调节的竖直向上的匀强磁场中。ab
棒的电阻为 R=0.10Ω,其他各部分电阻均不计。开始时,磁感应强度 。
图 7.02
(1)若保持磁感应强度 的大小不变,从 t=0 时刻开始,给 ab 棒施加一个水平向右的拉力,
使它做匀加速直线运动。此拉力 F 的大小随时间 t 变化关系如图 2 乙所示。求匀加速运动的加速度
及 ab 棒与导轨间的滑动摩擦力。
(2)若从 t=0 开始,使磁感应强度的大小从 B0 开始使其以 =0.20T/s 的变化率均匀增加。
求经过多长时间 ab 棒开始滑动?此时通过 ab 棒的电流大小和方向如何?(ab 棒与导轨间的最大静
摩擦力和滑动摩擦力相等)
解析:(1)当 t=0 时,
v m s1 1= /
U I R2 2= 并
F I
I F N N2
2
1
1
3
2 40 60= = =×
B T0 050= .
B0
∆
∆
B
t
F N F F maf1 13= − =,
当 t=2s 时,F2=8N
联立以上式得:
(2)当 时,为导体棒刚滑动的临界条件,则有:
则
3. 如图 7.03 所示,处于匀强磁场中的两根足够长、电阻不计的平行金属导轨相距 1m,导轨平面与
水平面成 =37°角,下端连接阻值为 R 的电阻。匀速磁场方向与导轨平面垂直。质量为
0.2kg、电阻不计的金属棒放在两导轨上,棒与导轨垂直并保持良好接触,它们之间的动摩擦因
数为 0.25。
(1)求金属棒沿导轨由静止开始下滑时的加速度大小;
(2)当金属棒下滑速度达到稳定时,电阻 R 消耗的功率为 8W,求该速度的大小;
(3)在上问中,若 R= ,金属棒中的电流方向由 a 到 b,求磁感应强度的大小与方向。(g=
10m/s2, °=0.6,cos37°=0.8)
图 7.03
解析:(1)金属棒开始下滑的初速为零,根据牛顿第二定律
F F B B Lat
R L maf2 0
0− − =
a F F R
B L t m s F F ma Nf= − = = − =( ) /2 1
0
2 2
2
14 1,
F Ff安 =
B
B
t L
R L Ff
∆
∆
2
=
B T B B B
t t t s= = + =4 17 50, ,∆
∆ .
θ
2Ω
sin37
①
由①式解得 ②
(2)设金属棒运动达到稳定时,速度为 v,所受安培力为 F,棒在沿导轨方向受力平衡:
③
此时金属棒克服安培力做功的功率等于电路中电阻 R 消耗的电功率
④
由③、④两式解得:
⑤
(3)设电路中电流为 I,两导轨间金属棒的长为 l,磁场的磁感应强度为 B
⑥
⑦
由⑥、⑦两式解得 ⑧
磁场方向垂直导轨平面向上。
4. 如图 7.04 所示,边长为 L=2m 的正方形导线框 ABCD 和一金属棒 MN 由粗细相同的同种材料
制成,每米长电阻为 R0=1 /m,以导线框两条对角线交点 O 为圆心,半径 r=0.5m 的匀强磁
场区域的磁感应强度为 B=0.5T,方向垂直纸面向里且垂直于导线框所在平面,金属棒 MN 与导
线框接触良好且与对角线 AC 平行放置于导线框上。若棒以 v=4m/s 的速度沿垂直于 AC 方向向
右匀速运动,当运动至 AC 位置时,求(计算结果保留二位有效数字):
(1)棒 MN 上通过的电流强度大小和方向;
(2)棒 MN 所受安培力的大小和方向。
mg mg masin cosθ µ θ− =
a m s= 4 2/
mg mg Fsin cosθ µ θ− − = 0
Fv P=
v m s= 10 /
I vBl
R
=
P I R= 2
B PR
vl T= = 0 4.
Ω
图 7.04
解析:(1)棒 MN 运动至 AC 位置时,棒上感应电动势为
线路总电阻 。
MN 棒上的电流
将数值代入上述式子可得:
I=0.41A,电流方向:N→M
(2)棒 MN 所受的安培力:
方向垂直 AC 向左。
说明:要特别注意公式 E=BLv 中的 L 为切割磁感线的有效长度,即在磁场中与速度方向垂直的
导线长度。
5. 如图 7.05 所示,足够长金属导轨 MN 和 PQ 与 R 相连,平行地放在水平桌面上。质量为 m 的金
属杆 ab 可以无摩擦地沿导轨运动。导轨与 ab 杆的电阻不计,导轨宽度为 L,磁感应强度为 B 的
匀强磁场垂直穿过整个导轨平面。现给金属杆 ab 一个瞬时冲量 I0,使 ab 杆向右滑行。
(1)回路最大电流是多少?
(2)当滑行过程中电阻上产生的热量为 Q 时,杆 ab 的加速度多大?
(3)杆 ab 从开始运动到停下共滑行了多少距离?
E B r v= 2 ·
R L L R= +( )2 0
I E
R
=
F B rI N FA A= =2 0 21. ,
图 7.05
答案:(1)由动量定理 得
由题可知金属杆作减速运动,刚开始有最大速度时有最大 ,所以回路最大电流:
(2)设此时杆的速度为 v,由动能定理有:
而 Q=
解之
由牛顿第二定律 及闭合电路欧姆定律
得
(3)对全过程应用动量定理有:
而 所以有
又
其中 x 为杆滑行的距离所以有 。
6. 如图 7.06 所示,光滑平行的水平金属导轨 MNPQ 相距 l,在 M 点和 P 点间接一个阻值为 R 的电
I mv0 0 0= − v I
m0
0=
E BLvm = 0
I BLv
R
BLI
mRm = =0 0
W mv mvA = −1
2
1
2
2
0
2 −WA
v I
m
Q
m
= −0
2
2
2
F BIL maA = =
I BLv
R
=
a B L v
mR
B L
mR
I
m
Q
m
= = −
2 2 2 2
0
2
2
2
− = −∑ BI L t Ii ·∆ 0 0
I t qi ·∆∑ = q I
BL
= 0
q I t E
R t R t t R
BLx
R
= = = = =·∆ ∆ ∆Φ
∆ ∆ ∆Φ
x I R
B L
= 0
2 2
阻,在两导轨间 矩形区域内有垂直导轨平面竖直向下、宽为 d 的匀强磁场,磁感强度
为 B。一质量为 m,电阻为 r 的导体棒 ab,垂直搁在导轨上,与磁场左边界相距 d0。现用一大
小为 F、水平向右的恒力拉 ab 棒,使它由静止开始运动,棒 ab 在离开磁场前已经做匀速直线运
动(棒 ab 与导轨始终保持良好的接触,导轨电阻不计)。求:
(1)棒 ab 在离开磁场右边界时的速度;
(2)棒 ab 通过磁场区的过程中整个回路所消耗的电能;
(3)试分析讨论 ab 棒在磁场中可能的运动情况。
图 7.06
解析:(1)ab 棒离开磁场右边界前做匀速运动,速度为 vm,则有:
对 ab 棒 =0,解得
(2)由能量守恒可得:
解得:
(3)设棒刚进入磁场时速度为 v 由:
棒在进入磁场前做匀加速直线运动,在磁场中运动可分三种情况讨论:
OO O O1 1 ' '
E Blv I E
R rm= = +,
F BIl− v F R r
B lm = +( )
2 2
F d d W mvm( )0
21
2
+ = +电
W F d d mF R r
B l电 = + − +
( ) ( )
0
2 2
4 42
F d mv v Fd
m
· 可得:0
2 01
2
2= =
①若 (或 ),则棒做匀速直线运动;
②若 (或 ),则棒先加速后匀速;
③若 (或 ),则棒先减速后匀速。
二、电磁流量计模型
1. 图 7.07 是电磁流量计的示意图,在非磁性材料做成的圆管道外加一匀强磁场区域,当管中的导
电液体流过此磁场区域时,测出管壁上的 ab 两点间的电动势 ,就可以知道管中液体的流量
Q——单位时间内流过液体的体积( )。已知管的直径为 D,磁感应强度为 B,试推出 Q
与 的关系表达式。
图 7.07
解析:a,b 两点的电势差是由于带电粒子受到洛伦兹力在管壁的上下两侧堆积电荷产生的。到
一定程度后上下两侧堆积的电荷不再增多,a,b 两点的电势差达到稳定值 ,此时,洛伦兹力和电
场力平衡: , , ,圆管的横截面积 故流量 。
2. 磁流体发电是一种新型发电方式,图 7.08 是其工作原理示意图。图甲中的长方体是发电导管,
其中空部分的长、高、宽分别为 ,前后两个侧面是绝缘体,下下两个侧面是电阻可略
2 0
2 2
Fd
m
F R r
B l
= +( ) F d B l
m R r
= +
2 0
4 4
2( )
2 0
2 2
Fd
m
F R r
B l
< +( ) F d B l
m R r
> +
2 0
4 4
2( )
2 0
2 2
Fd
m
F R r
B l
> +( ) F d B l
m R r
< +
2 0
4 4
2( )
ε
sm /3
ε
ε
qEqvB =
DE
ε=
DBv
ε= 2
4
1 DS π=
B
DSvQ 4
πε==
bal 、、
的导体电极,这两个电极与负载电阻 相连。整个发电导管处于图乙中磁场线圈产生的匀强磁
场里,磁感应强度为 B,方向如图所示。发电导管内有电阻率为 的高温、高速电离气体沿导
管向右流动,并通过专用管道导出。由于运动的电离气体受到磁场作用,产生了电动势。发电
导管内电离气体流速随磁场有无而不同。设发电导管内电离气体流速处处相同,且不存在磁场
时电离气体流速为 ,电离气体所受摩擦阻力总与流速成正比,发电导管两端的电离气体压强
差 维持恒定,求:
(1)不存在磁场时电离气体所受的摩擦阻力 F 多大;
(2)磁流体发电机的电动势 E 的大小;
(3)磁流体发电机发电导管的输入功率 P。
甲 乙
图 7.08
解析:(1)不存在磁场时,由力的平衡得 。
(2)设磁场存在时的气体流速为 v,则磁流体发电机的电动势
回路中的电流
电流 I 受到的安培力
设 为存在磁场时的摩擦阻力,依题意 ,存在磁场时,由力的平衡得
LR
ρ
0v
p∆
pabF ∆=
BavE =
bl
aR
BavI
L
ρ+
=
bl
aR
vaBF
L
ρ+
=
22
安
'F
0
'
v
v
F
F = 'FFpab +=∆ 安
根据上述各式解得
(3)磁流体发电机发电导管的输入功率
由能量守恒定律得 故:
)(
1 0
2
0
bl
aRpb
avB
BavE
L
ρ+∆
+
=
pabvP ∆=
vFEIP '+=
)(
1 0
2
0
bl
aRpb
avB
pabvP
L
ρ+∆
+
∆=
三、回旋加速模型
1. 正电子发射计算机断层(PET)是分子水平上的人体功能显像的国际领先技术,它为临床诊断和
治疗提供全新的手段。
(1)PET 在心脏疾病诊疗中,需要使用放射正电子的同位素氮 13 示踪剂,氮 13 是由小型回旋
加速器输出的高速质子轰击氧 16 获得的,反应中同时还产生另一个粒子,试写出该核反应
方程。
(2)PET 所用回旋加速器示意如图 7.11,其中置于高真空中的金属 D 形盒的半径为 R,两盒间
距为 d,在左侧 D 形盒圆心处放有粒子源 S,匀强磁场的磁感应强度为 B,方向如图所示。
质子质量为 m,电荷量为 q。设质子从粒子源 S 进入 加 速
电场时的初速度不计,质子在加速器中运动的总时间 为 t
(其中已略去了质子在加速电场中的运动时间),质子 在 电
场中的加速次数于回旋半周的次数相同,加速质子时 的 电
压大小可视为不变。求此加速器所需的高频电源频率 f 和
加速电压 U。
(3)试推证当 时,质子在电场中加速的总时间相 对 于
在 D 形盒中回旋的时间可忽略不计(质子在电场中运动时,不考虑磁场的影响)。
图 7.11
解析:
(1)核反应方程为: ①
(2)设质子加速后最大速度为 v,由牛顿第二定律得:
②
质子的回旋周期为: ③
dR >>
HeNHO 4
2
13
7
1
1
16
8 +→+
R
vmqvB
2
=
qB
m
v
RT
ππ 22 ==
高频电源的频率为: ④
质子加速后的最大动能为: ⑤
设质子在电场中加速的次数为 n,则:
⑥
又 ⑦
可解得: ⑧
(3)在电场中加速的总时间为:
⑨
在 D 形盒中回旋的总时间为 ⑩
故 ,即当 时, 可以忽略不计。
2. 在如图 7.12 所示的空间区域里,y 轴左方有一匀强电场,场强方向跟 y 轴正方向成 60°,
大小为 ;y 轴右方有一垂直纸面向里的匀强磁场,磁感应强度 。
有一质子以速度 ,由 x 轴上的 A 点(10cm,0)沿与 x 轴正方向成 30°斜向
上射入磁场,在磁场中运动一段时间后射入电场,后又回到磁场,经磁场作用后又射入电场。
已知质子质量近似为 ,电荷 ,质子重力不计。求:(计算结
果保留 3 位有效数字)
(1)质子在磁场中做圆周运动的半径。
(2)质子从开始运动到第二次到达 y 轴所经历的时间。
(3)质子第三次到达 y 轴的位置坐标。
m
qB
Tf π2
1 ==
2
2
1 mvEk =
nqUEk =
2
Tnt =
t
BRU 2
2π=
v
nd
v
ndt 2
2
1 ==
v
Rnt
π=2
12
2
1 <<=
R
d
t
t
π dR >> 1t
CNE /100.4 5×= TB 20.0=
smv /100.2 6×=
kgm 27106.1 −×= Cq 19106.1 −×=
图 7.12
解析:(1)质子在磁场中受洛伦兹力做匀速圆周运动,根据牛顿第二定律,
得质子做匀速圆周运动的半径为:
(2)由于质子的初速度方向与 x 轴正方向夹角为 30°,且半径恰好等于 OA,因此,质子将在
磁场中做半个圆周到达 y 轴上的 C 点,如答图 3 所示。
图 3
根据圆周运动的规律,质子做圆周运动周期为
质子从出发运动到第一次到达 y 轴的时间 为
质子进入电场时的速度方向与电场的方向相同,在电场中先做匀减速直线运动,速度减为零后反
向做匀加速直线运动,设质子在电场中运动的时间 ,根据牛顿第二定律: ,得
因此,质子从开始运动到第二次到达 y 轴的时间 t 为 。
(3)质子再次进入磁场时,速度的方向与电场的方向相同,在洛伦兹力的作用下做匀速圆周运
动,到达 y 轴的 D 点。
R
vmqvBf
2
==
mqB
mvR 10.0==
qB
mT
π2=
1t sqB
mTt 7
1 1057.12
−×≈== π
2t
2
2
t
vmqE =
sqE
mvt 7
2 100.12 −×==
sttt 7
21 1057.2 −×=+=
根据几何关系,可以得出 C 点到 D 点的距离为 ;
则质子第三次到达 y 轴的位置为
即质子第三次到达 y 轴的坐标为(0,34.6cm)。
°= 30cos2RCD
cmRROCCDy 32030cos230cos22 =°+°=+=
3. 如图 7.13 所示,在半径为 R 的绝缘圆筒内有匀强磁场,方向垂直纸面向里,圆筒正下方有小孔 C
与平行金属板 M、N 相通。两板间距离为 d,两板与电动势为 U 的电源连接,一带电量为 、
质量为 m 的带电粒子(重力忽略不计),开始时静止于 C 点正下方紧靠 N 板的 A 点,经电场加
速后从 C 点进入磁场,并以最短的时间从 C 点射出。已知带电粒子与筒壁的碰撞无电荷量的损
失,且碰撞后以原速率返回。求:
(1)筒内磁场的磁感应强度大小;
(2)带电粒子从 A 点出发至重新回到 A 点射出所经历的时间。
图 7.13
答案:(1)带电粒子从 C 孔进入,与筒壁碰撞 2 次再从 C 孔射出经历的时间为最短。
由
粒子由 C 孔进入磁场,在磁场中做匀速圆周运动的速率为
由 即 ,
得
(2)粒子从 A→C 的加速度为
由 ,粒子从 A→C 的时间为:
q−
2
2
1 mvqU =
m
qUv 2=
qB
mvr =
qB
mvR =°30cot
q
mU
RB 3
21=
md
qUa =
2
2
1atd =
qU
mda
dt 22
1 ==
粒子在磁场中运动的时间为
将(1)求得的 B 值代入,得 ,
求得: 。
4. 如图 7.14 甲所示,一对平行放置的金属板 M、N 的中心各有一小孔 P、Q、PQ 连线垂直金属板;
N 板右侧的圆 A 内分布有方向垂直于纸面向外的匀强磁场,磁感应强度大小为 B,圆半径为 r,
且圆心 O 在 PQ 的延长线上。现使置于 P 处的粒子源连续不断地沿 PQ 方向放出质量为 m、电量
为+q 的带电粒子(带电粒子的重力和初速度忽略不计,粒子间的相互作用力忽略不计),从某一
时刻开始,在板 M、N 间加上如图 5 乙所示的交变电压,周期为 T,电压大小为 U。如果只有在
每一个周期的 0—T/4 时间内放出的带电粒子才能从小孔 Q 中射出,求:
(1)在每一个周期内哪段时间放出的带电粒子到达 Q 孔的速度最大?
(2)该圆形磁场的哪些地方有带电粒子射出,在图中标出有带电粒子射出的区域。
甲 乙
图 7.14
答案:(1)在每一个周期 内放出的带电粒子到达 Q 孔的速度最大。设最大速度
为 v,则据动能定理得 ,求得 。
( 2 ) 因 为 解 得 带 电 粒 子 在 磁 场 中 的 最 小 偏 转 角 为
qB
mTt
π==
22
qU
mRt 2
3
2 π=
qU
mttt =+= 212 )2
322( Rd π+
Tt 4
22 −=∆
2
2
1 mvqU =
m
qUv 2=
R
r
R
vmBqv ==
2tan
2 θ,
。所以图 6 中斜线部分有带电粒子射出。
图 6
四、磁偏转模型
1. 一质点在一平面内运动,其轨迹如图 7.15 所示。它从 A 点出发,以恒定速率 经时间 t 到 B 点,
图中 x 轴上方的轨迹都是半径为 R 的半圆,下方的都是半径为 r 的半圆。
(1)求此质点由 A 到 B 沿 x 轴运动的平均速度。
(2)如果此质点带正电,且以上运动是在一恒定(不随时间而变)的磁场中发生的,试尽可
能详细地论述此磁场的分布情况。不考虑重力的影响。
图 7.15
解析:(1)由 A 到 B,若上、下各走了 N 个半圆,则其位移
①
其所经历的时间 ②
所以沿 x 方向的平均速度为
(2)I. 根据运动轨迹和速度方向,可确定加速度(向心加速度),从而确定受力的方向,再根
据质点带正电和运动方向,按洛伦兹力的知识可断定磁场的方向必是垂直于纸面向外。
mU
qBr 2arctan2=θ
0v
)(2 rRNx −=∆
0
)(
v
rRNt
+=∆ π
)(
)(2 0
rR
rRv
t
xv +
−=∆
∆= π
II. x 轴以上和以下轨迹都是半圆,可知两边的磁场皆为匀强磁场。
III. x 轴以上和以下轨迹半圆的半径不同,用 B 上和 B 下分别表示上、下的磁感应强度,用 m、q
和 v 分 别 表 示 带 电 质 点 的 质 量 、 电 量 和 速 度 的 大 小 ; 则 由 洛 伦 兹 力 和 牛 顿 定 律 可 知 ,
,由此可得 ,即下面磁感应强度是上面的 倍。
2. 如图 7.16 所示,一束波长为 的强光射在金属板 P 的 A 处发生了光电效应,能从 A 处向各个方
向逸出不同速率的光电子。金属板 P 的左侧有垂直纸面向里的匀强磁场,磁感强度为 B,面积足
够大,在 A 点上方 L 处有一涂荧光材料的金属条 Q,并与 P 垂直。现光束射到 A 处,金属条 Q
受到光电子的冲击而发出荧光的部分集中在 CD 间, 且
CD=L,光电子质量为 m,电量为 e,光速为 c
(1)金属板 P 逸出光电子后带什么电?
(2)计算 P 板金属发生光电效应的逸出功 W。
(3)从 D 点飞出的光电子中,在磁场中飞行的最短时 间是多少?
图 7.16
解析:(1)由电荷守恒定律得知 P 带正电。
(2)所有光电子中半径最大值
,所以 逸出功
(3)以最大半径运动并经 D 点的电子转过圆心角最小,运动时间最短
且 ,所以 。
3. 横截面为正方形的匀强磁场磁感应强度为 B.有一束速率不同的带电粒子垂直于磁场方向在 ab
边的中点,与 ab 边成 30°角射入磁场,如图 7.17 所示,已知正方形边长为 L.求这束带电粒子在
磁场中运动的最长时间是多少?运动时间最长的粒子的速率必须符合什么条件?(粒子的带电量为
+q、质量为 m)
r
vmqvBR
vmqvB
2
0
2
0 == 下上 、
R
r
B
B =
下
上
r
R
λ
2
2LR =
R
mvevB
2
=
m
eBLEkm 4
222
=
m
eBLhcW 4
222
−= λ
π
θπθ
22
==
T
t,
eB
mT
π2=
eB
mt 2
π=
解:粒子从 ab 边射出时在磁场中运动的时间最长,t=5T/6=5m/3qB.粒子要从 ab 边射出它的轨
迹就不能碰到 ad 边,轨迹恰好与 ad 边相切时 R+Rcos60°=L/2, R≤L/3,R=mv/qB,
v≤qBL/3m
4. 如图 40-A11 所示,在 xoy 平面内有许多电子(每个电子质量为 m,电量为 e)从坐标原点 o 不
断地以相同大小的速度 v0 沿不同的方向射入第Ⅰ象限.现加上一个垂直于 xoy 平面的磁感应强
度为 B 的匀强磁场,要求这些电子穿过该磁场后都能平行于 x 轴向 x 轴正方向运动,试求出符
合该条件的磁场的最小面积.
解:所有电子均在匀强磁场中做半径 R=mv0/Be 的匀速圆周运动,沿 y 轴正方向射入的电子须
转过 1/4 圆周才能沿 x 轴正方向运动,它的轨迹可当作该磁场的上边界 a(如图所示),其圆的方
程为:(R-x)2+y2=R2.
沿与x轴成任意角 α(90°>α>0°)射入的电子转过一段较短的圆弧 OP(其圆心为 O′)运
动方向亦可沿 x 轴正方向,设 P 点坐标为(x,y),因为PO′必定垂直于 x 轴,可得方程:x2+(R
-y)2=R2,
此方程也是一个半径为 R 的圆,这就是磁场的下边界 b.
该磁场的最小范围应是以上两方程所代表的两个圆的交集,其面积为 Smin=2[(πR2/4)-(R2
/2)]=[(π-2)/2](mv0)2/Be2.
5. 图 7.19 中虚线 MN 是一垂直纸面的平面与纸面的交线,在平面右侧的半空间存在一磁感应强度
a
b c
d
30°
图 7.17
y
x
o
图 7.18
为 B 的匀强磁场,方向垂直纸面向外.O 是 MN 上的一点,从 O 点可以向磁场区域发射电量为+q、
质量为 m、速率为 v 的粒子,粒子射入磁场时的速度可在纸面内各个方向.已知先后射入的两个
粒子恰好在磁场中给定的 P 点相遇,P 到 O 的距离为 L.不计重力及粒子间的相互作用.求:
(1)所考察的粒子在磁场中的轨道半径;
(2)这两个粒子从 O 点射入磁场的时间间隔.
解:(1)设粒子在磁场中做圆周运动的轨道半径为 R,由牛顿第二定律得:qvB=mv2/R, R=mv/qB
①
(2)以 OP 为弦画两个半径相等的圆弧,分别表示两个粒子的轨道.圆心和直径分别为 O1、O2 和
OO1Q1、OO2Q2,在 O 处两个圆的切线分别表示两个粒子的射入方向,用θ表示它们之间的夹角,由几
何关系得:∠PO1Q1=∠PO2Q2=θ ②
从 O 点射入到相遇,粒子 1 的路程为半个圆周加弧长 Q1P,且 Q1P=Rθ ③
粒子 2 的路程为半个圆周减弧长 Q2P,且 Q2P=Rθ ④
粒子 1 的运动时间为 t1=T/2+Rθ/v ⑤
粒子 2 的运动时间为 t1=T/2-Rθ/v ⑥
两例子射入的时间间隔为△t=t1-t2=2Rθ/v ⑦
因 Rcoc(θ/2)=L/2 解得
θ=2Rarccos(L/2R) ⑧
由①⑦⑧三式解得:
6. 串列加速器是用来产生高能离子的装置.图 41-B11 中虚线框内为其主体的原理示意图,其中加
速管的中部 b 处有很高的正电势 U,a、c 两端均有电极接地(电势为零).现将速度很低的负一
价碳离子从 a 端输入,当离子到达 b 处时,可被设在 b 处的特殊装置将其电子剥离,成为 n 价
正离子,而不改变其速度大小.这些正 n 价碳离子从 c 端飞出后进入一与其速度方向垂直的、磁
感应强度为 B 的匀强磁场中,在磁场中做半径为 R 的圆周运动.已知碳离子质量 m=2.0×10-
26kg,U=7.5×105V,B=0.5T,n=2, 基 元 电 荷
e=1.6×10-19C,求 R.
解:设碳离子到达 b 处的速度为 v1,从 c 端射出时的 速 度
为 v2,由能量关系得: ①
)2arccos(4
mr
LqB
qB
mt =
eUmv =2
12
1
图 7.19
a b c
加速管
图 7.20
②进入磁场后,碳离子做圆周运动,可得 ③
由以上三式可得 ④
由④式及题中所给数值可解得 R=0.75m
7. 在如图 7.21 所示的装置中 M N 是一对相距为 d 的水平金属板在它们上方另有一水平金属板 Q,
其上有一小孔 S 正对着板 M 上的小孔 O.MN 间有一垂直向里的磁感应强度为B 匀强磁场.在板 Q
的 S 孔处有质量为 m、电荷量为-q 的负离子,其重力和初速度不计,电源的电动势为 E,内阻为
r,RAB 总电阻为 2r,滑动触头 C 在 AB 的中点,离子从 MN 的 中 点
飞出,求离子飞出磁场时的速度大小.
解:根据闭合电路欧姆定律得
离子在 QM 间加速,由动能定理得:
离子在 MN 间运动,由动能定理得:
解得
8. 如图 7.22 所示,匀强电场的场强 E=4V/m,方向水平向左,匀强磁场的磁感应强度 B=2T,方
向垂直于纸面向里.一个质量 m=1g、带正电的小物体 A 从 M 点沿绝缘粗糙的竖直壁无初速下滑,
当它滑行 h=0.8m 到 N 点时离开壁做曲线运动,运动到 P 点时恰好处于平衡状态,此时速度方
向与水平方向成 45°设 P 与 M 的高度差 H=1.6m.求:
(1)A 沿壁下滑过程中摩擦力做的功;
(2)P 与 M 的水平距离 S.(g 取 10m/s2)
neUmvmv += 2
1
2
2 2
1
2
1
R
vmBnev
2
2
2 =
e
nmU
BnR )1(21 +=
3
2ERrR
EU AB
AB
AB =+=
3
ERrR
EU AC
AB
AC =+=
2
2
1
oAB mvqU =
22
2
1
2
1
2
1
otAC mvmvUq −=−
m
qEv =
图 7.21
图 7.22
解:(1)小物体到 N 点时离开壁时,qvNB=qE
vN=E/B=2m/s
从 M 到 N 的过程中,根据动能定理
代入数据得 Wf=-6×10-3J
(2) 小物体运动到 P 点时恰好处于平衡状态 qE=mg, , m/s
从 M 到 P 的过程中,根据动能定理
代入数据得 S=0.6m
2
2
1
Nf mvWmgh =+
qEBqvP 2= 22=Pv
2
2
1
Pf mvqESWmgH =−+