- 2021-04-13 发布 |
- 37.5 KB |
- 17页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
【数学】2019届一轮复习人教A版(文)参数方程学案
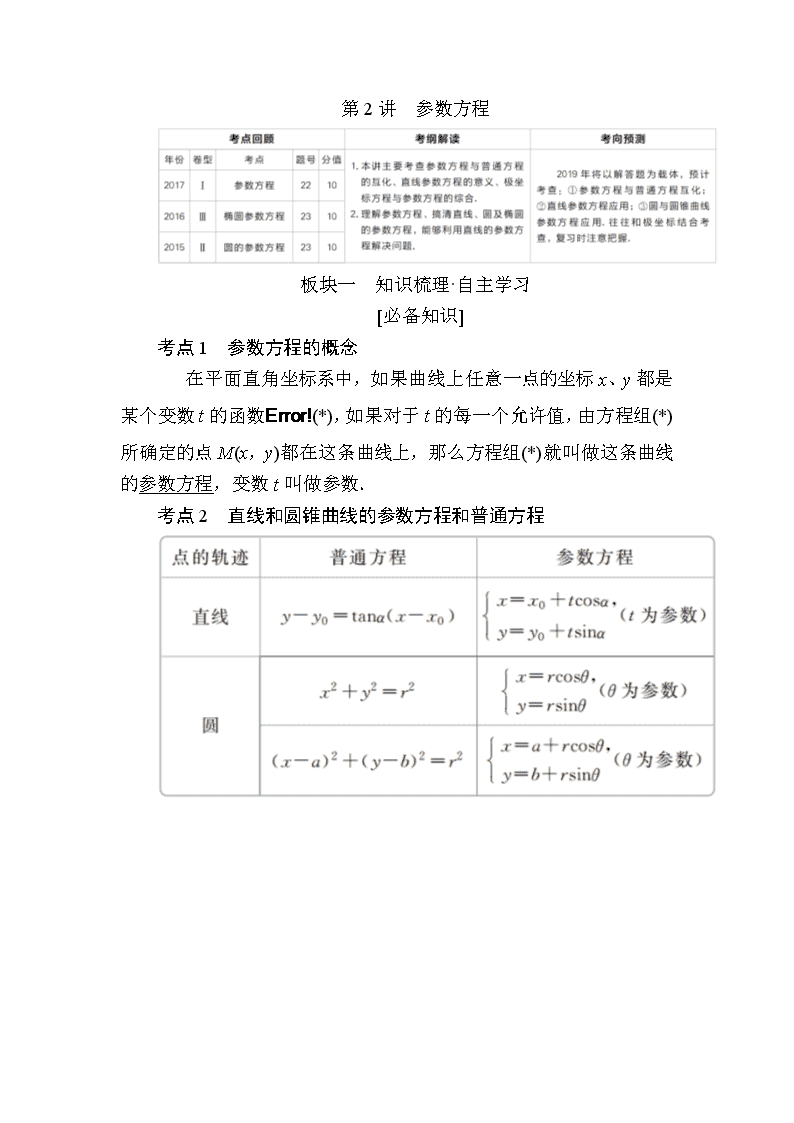
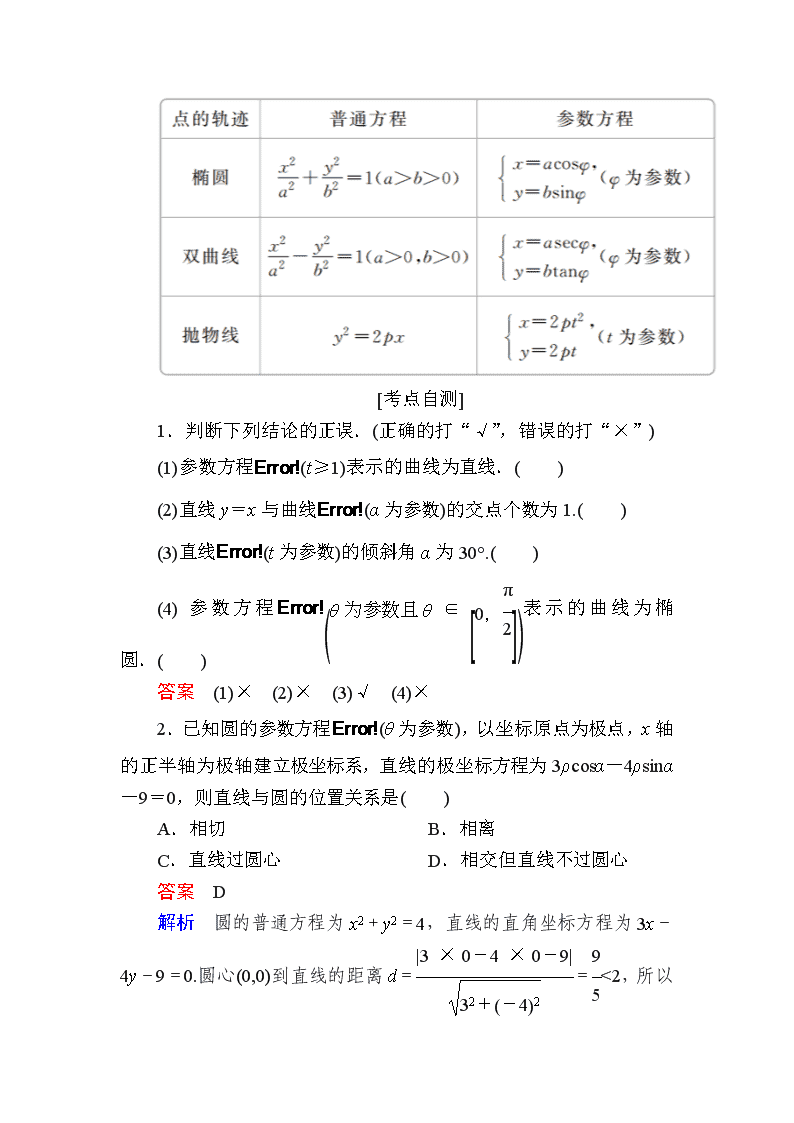
第2讲 参数方程 板块一 知识梳理·自主学习 [必备知识] 考点1 参数方程的概念 在平面直角坐标系中,如果曲线上任意一点的坐标x、y都是某个变数t的函数(*),如果对于t的每一个允许值,由方程组(*)所确定的点M(x,y)都在这条曲线上,那么方程组(*)就叫做这条曲线的参数方程,变数t叫做参数. 考点2 直线和圆锥曲线的参数方程和普通方程 [考点自测] 1.判断下列结论的正误.(正确的打“√”,错误的打“×”) (1)参数方程(t≥1)表示的曲线为直线.( ) (2)直线y=x与曲线(α为参数)的交点个数为1.( ) (3)直线(t为参数)的倾斜角α为30°.( ) (4)参数方程表示的曲线为椭圆.( ) 答案 (1)× (2)× (3)√ (4)× 2.已知圆的参数方程(θ为参数),以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,直线的极坐标方程为3ρcosα-4ρsinα-9=0,则直线与圆的位置关系是( ) A.相切 B.相离 C.直线过圆心 D.相交但直线不过圆心 答案 D 解析 圆的普通方程为x2+y2=4,直线的直角坐标方程为3x-4y-9=0.圆心(0,0)到直线的距离d==<2,所以直线与圆相交.显然直线不过原点(0,0),故选D. 3.[2018·安徽模拟]以平面直角坐标系的原点为极点,x轴的正半轴为极轴,建立极坐标系,两种坐标系中取相同的长度单位.已知直线l的参数方程是(t为参数),圆C的极坐标方程是ρ=4cosθ,则直线l被圆C截得的弦长为( ) A. B.2 C. D.2 答案 D 解析 由题意得直线l的方程为x-y-4=0,圆C的方程为(x-2)2+y2=4.则圆心到直线的距离d=,故弦长=2=2. 4.[2018·湖南模拟]在平面直角坐标系xOy中,若直线l:(t为参数)过椭圆C:(φ为参数)的右顶点,则常数a的值为________. 答案 3 解析 由题意知在直角坐标系下,直线l的方程为y=x-a,椭圆的方程为+=1,所以其右顶点为(3,0).由题意知0=3-a,所以a=3. 5.[2018·天津模拟]已知抛物线的参数方程为 (t为参数),其中p>0,焦点为F,准线为l.过抛物线上一点M作l的垂线,垂足为E.若|EF|=|MF|,点M的横坐标是3,则p=________. 答案 2 解析 由参数方程 (t为参数),p>0,可得曲线方程为y2=2px(p>0). ∵|EF|=|MF|,且|MF|=|ME|(抛物线定义), ∴△MEF为等边三角形, E的横坐标为-,M的横坐标为3. ∴EM中点的横坐标为,与F的横坐标相同. ∴=,∴p=2. 6.[2015·湖北高考]在直角坐标系xOy中,以O为极点,x轴的正半轴为极轴建立极坐标系.已知直线l的极坐标方程为ρ(sinθ-3cosθ)=0,曲线C的参数方程为(t为参数),l与C相交于A,B两点,则|AB|=________. 答案 2 解析 因为ρ(sinθ-3cosθ)=0,所以ρsinθ=3ρcosθ,所以y=3x.由消去t得y2-x2=4.由解得或不妨令A,B,由两点间的距离公式得|AB|==2. 板块二 典例探究·考向突破 考向 参数方程与普通方程的互化 例 1 [2017·全国卷Ⅰ]在直角坐标系xOy中,曲线C的参数方程为(θ为参数),直线l的参数方程为(t为参数). (1)若a=-1,求C与l的交点坐标; (2)若C上的点到l距离的最大值为,求a. 解 (1)曲线C的普通方程为+y2=1. 当a=-1时,直线l的普通方程为x+4y-3=0. 由 解得或 从而C与l的交点坐标为(3,0),. (2)直线l的普通方程为x+4y-a-4=0,故C上的点(3cosθ,sinθ)到l的距离为d= =, 当a≥-4时,d的最大值为. 由题设得=,所以a=8; 当a<-4时,d的最大值为. 由题设得=,所以a=-16. 综上,a=8或a=-16. 触类旁通 将参数方程化为普通方程的方法 (1)将参数方程化为普通方程,需要根据参数方程的结构特征,选取适当的消参方法.常见的消参方法有:代入消参法、加减消参法、平方消参法等,对于含三角函数的参数方程,常利用同角三角函数关系式消参,如sin2θ+cos2θ=1等. (2)将参数方程化为普通方程时,要注意两种方程的等价性,不要增解. 【变式训练1】 [2018·湖南长郡中学模拟]已知曲线C1: (t为参数),C2:(θ为参数). (1)化C1,C2的方程为普通方程,并说明它们分别表示什么曲线; (2)若C1上的点P对应的参数为t=,Q为C2上的动点,求PQ的中点M到直线C3:(t为参数)距离的最小值. 解 (1)C1:(x+4)2+(y-3)2=1,C2:+=1, C1表示圆心是(-4,3),半径是1的圆,C2表示中心是坐标原点,焦点在x轴上,长半轴长是8,短半轴长是3的椭圆. (2)当t=时,P(-4,4),又Q(8cosθ,3sinθ),故M, 又C3的普通方程为x-2y-7=0,则M到C3的距离d=|4cosθ-3sinθ-13|=·|3sinθ-4cosθ+13|=|5sin(θ-φ)+13|, 所以d的最小值为. 考向 直角坐标方程、参数方程、极坐标方程的互化 例 2 [2018·宝鸡模拟]在平面直角坐标系xOy中,已知C1:(θ为参数),将C1上的所有点的横坐标、纵坐标分别伸长为原来的和2倍后得到曲线C2.以平面直角坐标系xOy的原点O为极点,x轴的正半轴为极轴,取相同的单位长度建立极坐标系,已知直线l:ρ(cosθ+sinθ)=4. (1)试写出曲线C1的极坐标方程与曲线C2的参数方程; (2)在曲线C2上求一点P,使点P到直线l的距离最小,并求此最小值. 解 (1)把C1:(θ为参数),消去参数化为普通方程为x2+y2=1,故曲线C1的极坐标方程为ρ=1. 再根据函数图象的伸缩变换规律可得曲线C2的普通方程为2+2=1,即+=1.故曲线C2的参数方程为(θ为参数). (2)直线l:ρ(cosθ+sinθ)=4,即x+y-4=0,设点P(cosθ,2sinθ),则点P到直线的距离为 d==, 故当sin=1时,d取得最小值,此时,θ=2kπ+(k∈Z),点P(1,),故曲线C2上有一点P(1,)满足到直线l的距离的最小值为-. 触类旁通 参数方程和直角坐标方程及 极坐标方程之间的相互转化 (1)把C1消去参数化为普通方程为x2+y2=1,再化为极坐标方程.根据函数图象的伸缩变换规律可得曲线C2的普通方程,再化为参数方程. (2)先求得直线l的直角坐标方程,设点P(cosθ,2sinθ),求得点P到直线的距离为d=,故当sin=1时,即θ=2kπ+,k∈Z时,点P到直线l的距离最小,从而求得P的坐标以及此最小值. 【变式训练2】 [2018·宜春模拟]在直角坐标系xOy中,圆C1和C2的参数方程分别是(φ为参数)和(φ为参数),以O为极点,x轴的正半轴为极轴建立极坐标系. (1)求圆C1和C2的极坐标方程; (2)射线OM:θ=α与圆C1的交点为O、P,与圆C2的交点为O、Q,求|OP|·|OQ|的最大值. 解 (1)圆C1(φ为参数), 转化成直角坐标方程为(x-2)2+y2=4, 即x2+y2-4x=0, 转化成极坐标方程为ρ2=4ρcosθ, 即ρ=4cosθ 圆C2(φ为参数), 转化成直角坐标方程为x2+(y-1)2=1, 即x2+y2-2y=0 转化成极坐标方程为ρ2=2ρsinθ, 即ρ=2sinθ. (2)射线OM:θ=α与圆C1的交点为O、P,与圆C2的交点为O、Q, 设P,Q对应的极径分别为ρ1,ρ2,则|OP|·|OQ|=ρ1ρ2=4|sin2α|. ∵(|sin2α|)max=1,∴|OP|·|OQ|的最大值为4. 考向 直线的参数方程 例 3 [2018·泉州模拟]已知在平面直角坐标系xOy中,直线l的参数方程是(t是参数),以平面直角坐标系的原点为极点,x轴的正半轴为极轴建立极坐标系,两种坐标系中取相同的单位长度,曲线C的极坐标方程为ρ=4sin. (1)写出直线l的普通方程和曲线C的直角坐标方程; (2)设点P的直角坐标为(1,2),直线l与曲线C的交点为A,B,试求|AB|及|PA|·|PB|的值. 解 (1)直线l的普通方程为x+y-3=0. ρ=4sin=4sinθ+4cosθ,所以ρ2=4ρsinθ+4ρcosθ,所以曲线C的直角坐标方程为x2+y2-4x-4y=0(或写成(x-2)2+(y-2)2=8). (2)直线l的参数方程可化为(t′是参数), 把直线l的参数方程代入x2+y2-4x-4y=0得,t′2+t′-7=0. 设A,B对应的参数分别为t1′,t2′,则t1′+t2′=-,t1′t2′=-7,点P(1,2)显然在直线l上,故|AB|=|t1′-t2′|==,故|PA|·|PB|=|t1′t2′|=7. 触类旁通 直线的参数方程的标准形式 过定点P0(x0,y0),倾斜角为α的直线参数方程的标准形式为(t为参数),t的几何意义是直线上的点P到点P0(x0,y0)的数量,即|t|=|PP0|时为距离.使用该式时直线上任意两点P1、P2对应的参数分别为t1、t2,则|P1P2|=|t1-t2|,P1P2的中点对应的参数为(t1+t2). 【变式训练3】 [2018·哈尔滨模拟]在平面直角坐标系xOy中,直线l的参数方程为,以坐标原点O为极点,x轴的非负半轴为极轴建立极坐标系,已知圆C的圆心C的极坐标为,半径为2,直线l与圆C交于M,N两点. (1)求圆C的极坐标方程; (2)当φ变化时,求弦长|MN|的取值范围. 解 (1)由已知,得圆心C的直角坐标为(1,),半径为2, ∴圆C的直角坐标方程为(x-1)2+(y-)2=4, 即x2+y2-2x-2y=0, ∵x=ρcosθ,y=ρsinθ,∴ρ2-2ρcosθ-2ρsinθ=0, 故圆C的极坐标方程为ρ=4cos. (2)由(1)知,圆C的直角坐标方程为x2+y2-2x-2y=0,将直线的参数方程代入圆的直角坐标方程中得, (2+tcosφ)2+(+tsinφ)2-2(2+tcosφ)-2(+tsinφ)=0, 整理得,t2+2tcosφ-3=0, 设M,N两点对应的参数分别为t1,t2,则t1+t2=-2cosφ,t1·t2=-3, ∴|MN|=|t1-t2|= =, ∵φ∈,∴cosφ∈,∴|MN|∈[,4]. 考向 极坐标、参数方程的综合应用 例 4 [2018·盐城模拟]已知直线l的参数方程为(t为参数),以原点O为极点,x轴的正半轴为极轴建立极坐标系,曲线C的极坐标方程为ρ=. (1)直接写出直线l的极坐标方程和曲线C的直角坐标方程; (2)过曲线C上任意一点P作与直线l夹角为的直线m,设直线m与直线l的交点为A,求|PA|的最大值. 解 (1)由(t为参数),得l的普通方程为2x+y-6=0,令x=ρcosθ,y=ρsinθ,得直线l的极坐标方程为2ρcosθ+ρsinθ-6=0,由曲线C的极坐标方程,知ρ2+3ρ2cos2θ=4,所以曲线C的直角坐标方程为x2 +=1. (2)由(1),知直线l的普通方程为2x+y-6=0,设曲线C上任意一点P(cosα,2sinα),点P到直线l的距离d=. 由题意得|PA|==, ∴当sin=-1时,|PA|取得最大值,最大值为. 触类旁通 极坐标与参数方程综合应用中注意的问题 (1)在已知极坐标方程求曲线交点、距离、线段长、切线等几何问题时,如果不能直接用极坐标解决,或用极坐标解决较麻烦时,可将极坐标方程转化为直角坐标方程解决.转化时要注意两坐标系的关系,注意ρ,θ的取值范围,取值范围不同对应的曲线不同. (2)解答参数方程的有关问题时,首先要弄清参数是谁,代表的几何意义是什么;其次要认真观察方程的表现形式,以便于寻找最佳化简途径. 【变式训练4】 在直角坐标系xOy中,曲线C1的参数方程为(t为参数),若以O为极点,x轴正半轴为极轴建立极坐标系,曲线C2的极坐标方程为ρcosθ+2ρsinθ+4=0(ρ≥0). (1)求曲线C1的普通方程与曲线C2的直角坐标方程; (2)若A是曲线C1上的任意一点,B是曲线C2上的任意一点,求线段AB的最小值. 解 (1)由消去参数t,得曲线C1的普通方程为x2=4y. 将代入到ρcosθ+2ρsinθ+4=0(ρ≥0)中,得x+2y+4=0, 即曲线C2的直角坐标方程为x+2y+4=0. (2)解法一:因为A是曲线C1上的任意一点,B是曲线C2上的任意一点,所以线段AB的最小值,即与曲线C2平行的直线与曲线C1相切时,切点到曲线C2的距离,设切线的方程为x+2y+m=0, 由消去y得x2+2x+2m=0, 所以Δ=22-4×1×2m=0,得m=, 因此切点为,其到直线C2的距离d==,即|AB|min=. 解法二:因为A是曲线C1上的任意一点,B是曲线C2上的任意一点, 所以可设点A(4t,4t2),线段AB的最小值即点A到直线C2的距离d的最小值, 所以d==, 当t=-时,dmin=,即|AB|min=. 核心规律 参数方程与普通方程互化的方法 (1)参数方程化为普通方程:化参数方程为普通方程的基本思路是消去参数,常用的消参方法有代入消去法、加减消去法、恒等式(三角的或代数的)消去法. (2)普通方程化为参数方程:化普通方程为参数方程的基本思路是引入参数,即选定合适的参数t,先确定一个关系x=f(t)(或y=φ(t)),再代入普通方程F(x,y)=0,求得另一关系y=φ(t)(或x=f(t)). 满分策略 参数方程应用中的注意事项 (1)参数方程通过代入消元或加减消元消去参数化为普通方程,要注意普通方程与原参数方程的取值范围保持一致. (2)普通方程化为参数方程需要引入参数,选择的参数不同,所得的参数方程也不一样.一般地,常选择的参数有角、有向线段的数量、斜率,某一点的横坐标(或纵坐标). (3)常见曲线的参数方程中的参数都有几何意义,注意利用几何意义常能够给解题带来方便. 板块三 模拟演练·提能增分 [基础能力达标] 1.[2017·江苏高考]在平面直角坐标系xOy中,已知直线l的参数方程为(t为参数),曲线C的参数方程为(s为参数).设P为曲线C上的动点,求点P到直线l的距离的最小值. 解 直线l的普通方程为x-2y+8=0. 因为点P在曲线C上,设P(2s2,2s), 从而点P到直线l的距离d= =. 当s=时,dmin=. 因此当点P的坐标为(4,4)时,曲线C上的点P到直线l的距离取到最小值. 2.[2017·全国卷Ⅲ]在直角坐标系xOy中,直线l1的参数方程为(t为参数),直线l2的参数方程为(m为参数).设l1与l2的交点为P,当k变化时,P的轨迹为曲线C. (1)写出C的普通方程; (2)以坐标原点为极点,x轴正半轴为极轴建立极坐标系,设l3:ρ(cosθ+sinθ)-=0,M为l3与C的交点,求M的极径. 解 (1)消去参数t得l1的普通方程l1:y=k(x-2); 消去参数m得l2的普通方程l2:y=(x+2). 设P(x,y),由题设得 消去k得x2-y2=4(y≠0), 所以C的普通方程为x2-y2=4(y≠0). (2)C的极坐标方程为ρ2(cos2θ-sin2θ)=4(0<θ<2π,θ≠π), 联立得 cosθ-sinθ=2(cosθ+sinθ). 故tanθ=-,从而cos2θ=,sin2θ=. 代入ρ2(cos2θ-sin2θ)=4得ρ2=5, 所以交点M的极径为. 3.[2018·安阳模拟]已知极坐标系的极点为直角坐标系xOy的原点,极轴为x轴的正半轴,两种坐标系中的长度单位相同,圆C的直角坐标系方程为x2+y2+2x-2y=0,直线l的参数方程为(t为参数),射线OM的极坐标方程为θ=. (1)求圆C和直线l的极坐标方程; (2)已知射线OM与圆C的交点为O,P,与直线l的交点为Q,求线段PQ的长. 解 (1)∵圆C的直角坐标系方程为x2+y2+2x-2y=0, ∴圆C的极坐标方程为ρ2+2ρcosθ-2ρsinθ=0, 化简得ρ+2cosθ-2sinθ=0,即ρ=2sin. ∵直线l的参数方程为(t为参数), 消参得:x-y+1=0, ∴直线l的极坐标方程为ρcosθ-ρsinθ+1=0, 即ρ=. (2)当θ=时,|OP|=2sin=2, 故点P的极坐标为, |OQ|===, 故点Q的极坐标为, |PQ|=|OP|-|OQ|=2-= 故线段PQ的长为. 4.[2018·长沙模拟]以直角坐标系的原点O为极点,x轴的正半轴为极轴,且两个坐标系取相等的长度单位.已知直线l的参数方程为(t为参数,0<φ<π),曲线C的极坐标方程为ρcos2θ=4sinθ. (1)求直线l的普通方程和曲线C的直角坐标方程; (2)设直线l与曲线C相交于A,B两点,当φ变化时,求|AB|的最小值. 解 (1)由(t为参数,0<φ<π),消去t,得xcosφ-ysinφ+sinφ=0, 所以直线l的普通方程为xcosφ-ysinφ+sinφ=0. 由ρcos2θ=4sinθ,得(ρcosθ)2=4ρsinθ, 把x=ρcosθ,y=ρsinθ代入上式,得x2=4y, 所以曲线C的直角坐标方程为x2=4y. (2)将直线l的参数方程代入x2=4y,得t2sin2φ-4tcosφ-4=0, 设A,B两点对应的参数分别为t1,t2, 则t1+t2=,t1t2=-, 所以|AB|=|t1-t2|= ==. 当φ=时,|AB|取得最小值,最小值为4. 5.[2018·榆林模拟]在直角坐标系xOy中,曲线C的参数方程为(t为参数,a>0).以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,已知直线l的极坐标方程为ρcos=-2. (1)设P是曲线C上的一个动点,当a=2时,求点P到直线l的距离的最小值; (2)若曲线C上的所有点均在直线l的右下方,求a的取值范围. 解 (1)由ρcos=-2,得(ρcosθ-ρsinθ)=-2, 化成直角坐标方程,得(x-y)=-2,即直线l的方程为x-y+4=0. 依题意,设P(2cost,2sint),则点P到直线l的距离d==. 当t+=2kπ+π,即t=2kπ+,k∈Z时,dmin=2-2. 故点P到直线l的距离的最小值为2-2. (2)∵曲线C上的所有点均在直线l的右下方, ∴对∀t∈R,有acost-2sint+4>0恒成立, 即cos(t+φ)>-4恒成立, ∴<4,又a>0,∴0查看更多