四川省达州市2020年中考物理一轮复习第14讲简单机械功和机械能课件
第14讲 简单机械、
功和机械能
考点
·
梳理知识点
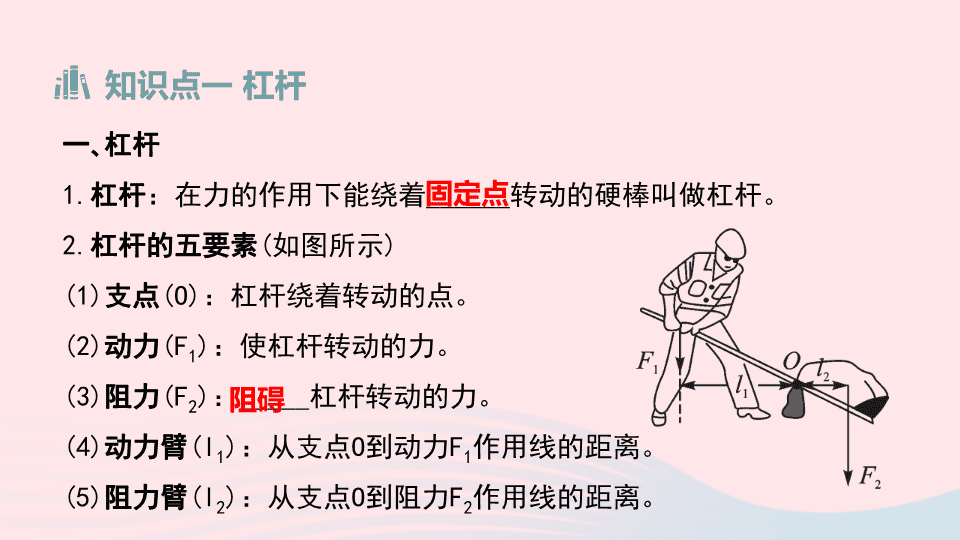
一、杠杆
1.
杠杆
:在力的作用下能绕着
______
转动的硬棒叫做杠杆。
2.
杠杆的五要素
(如图所示)
(1)
支点
(O):杠杆绕着转动的点。
(2)
动力
(F
1
):使杠杆转动的力。
(3)
阻力
(F
2
):
_____
杠杆转动的力。
(4)
动力臂
(l
1
):从支点O到动力F
1
作用线的距离。
(5)
阻力臂
(l
2
):从支点O到阻力F
2
作用线的距离。
知识点一
杠杆
固定点
阻碍
3.杠杆的平衡条件:
_______
。
二、生活中的杠杆
F
1
l
1
=F
2
l
2
杠杆类型
省力杠杆
费力杠杆
等臂杠杆
示意图
力臂的关系
l
1
____
l
2
l
1
____
l
2
l
1
____
l
2
力的关系
F
1
____
F
2
F
1
____
F
2
F
1
____
F
2
特点
____________
_____________
__________________
应用
撬棒、钢丝钳、铡刀等
筷子、镊子、钓鱼竿等
天平、定滑轮、跷跷板等
>
>
<
<
=
=
省力、费距离
费力、省距离
既不省力也不省距离
1.
对力臂的理解
:
力臂
是“点”到“直线”的
距离(即垂线段的长度),不是支点到力的作用点的距离。作用线是通过力的作用点沿力的方向所画的直线;某个力作用在杠杆上,若作用点不变,但力的方向改变,那么力臂一般要改变;若力的作用线过支点,则它的力臂为零。
夺分点拨
2.
判断杠杆类型常用的两种方法
(1)
动力和阻力在异侧
:F
1
/
F
2
>1时是费力杠杆,F
1
/
F
2
<1时是省力杠杆,F
1
/
F
2
=1时是等臂杠杆;
(2)
动力和阻力在同侧
:若阻力作用在支点和动力之间时,则是省力杠杆;若动力作用在支点和阻力之间时,则是费力杠杆。
示例1
如图是用螺丝刀撬骑马钉,螺丝刀可看成一根杠杆,它是一个
______
杠杆。若用力往下撬时,其支点位于图中的
___
点;若用力往上撬时,其支点位于图中的
___
点,且后者比前者
______
(选填“省力”或“费力”)些。
双基突破
省力
C
A
省力
一、定滑轮、动滑轮、滑轮组的比较(不计绳重、摩擦及滑轮重)
知识点二
其他简单机械
定滑轮
动滑轮
滑轮组
图示
实质
_____
杠杆
______
杠杆
等臂
省力
定滑轮
动滑轮
滑轮组
F和G的关系
F=
___
F=
_____
F=
_____
F=
_____
s和h的关系
s=
___
s=
___
s=
___
s=
___
特点
既不省力也不省距离,但能改变力的方向
省力、费距离,不能改变力的方向
省力、费距离,但能否改变力的方向和绕线方式有关
G
1/2G
1/2G
1/3G
h
2h
2h
3h
1.
滑轮省力情况的判断方法
:承担动滑轮的绳子段数为n,不计摩擦、动滑轮自重和绳重时,拉力F=G
物
/n;只忽略轮轴间的摩擦及绳重时,拉力F=(G
物
+G
动
)/n。
2.
确定滑轮组中承担物重的绳子段数(n)的方法
:直接数连接在动滑轮上的绳子段数。
3.
滑轮组在水平方向使用时拉力的计算方法
:拉力F=f
阻
/n(f
阻
为物体所受的摩擦阻力)。
夺分点拨
示例
2
如图所示,物重G都为12N,当物体静止时(不计摩擦和机械自重),则F
1
=
___
N,F
2
=
___
N,F
3
=
___
N。
双基突破
12
6
4
二、轮轴和斜面
1.
轮轴
:轮轴由轮和轴组成,是变形杠杆,动力作用在轮上省力(如汽车
的方向盘),动力作用在轴上费力(如变速自行车的后轮)。
2.
斜面
:斜面是一种省力、费距离的简单机械。例如:楼梯、盘山公路等。
知识点三 动能和势能
类别
动能
势能
重力势能
弹性势能
定义
物体由于
_____
而具有的能
物体由于
________
而具有的能
物体由于发生
_________
而具有的能
影响因素
物体的
_____
和
_________
物体的
_____
和
_____________
物体的
________
弹性形变
运动
位置较高
质量
运动速度
质量
被举起的高度
弹性形变
判断有无
物体运动必定具有动能;速度为零,动能为零
物体被举高必定具有重力势能;被举起的高度为零,重力势能为零
物体有弹性形变必定具有弹性势能;反之,则无
说明
(1)物体能够________,我们就说这个物体具有能量,简称能。能量的单位是_______;
(2)一个物体能够做的功越多,表示这个物体具有的能量越___;
(3)正在做功的物体一定具有能量,但具有能量的物体不一定正在做功;
(4)判断重力势能的大小,一般是以水平地面为标准
对外做功
焦耳(J)
大
示例
3
如图所示,在
“研究物体动能与哪些因素有关”
的
实验中,将A、B、C三小球先后从同一装置的h
A
、h
B
、
h
C
高处滚下(m
A
=m
B
h
B
),推动纸盒运动一段距离后静止。
(1)小球从高处滚下的过程中是
_______
能转化成
___
能;
(2)研究动能与速度的关系时,我们应选择
______
两图来进行比较;
(3)A、B、C三个小球刚到达水平面时,
___
球的动能最小;
(4)该实验得到的结论是
。
双基突破
重力势
动
甲、乙
B
质量相同时,物体的速度越大,动能越大;
速度相同时,物体的质量越大,动能越大
知识点四 机械功和机械功率
一、机械功
1.
定义
:在物理学中,把作用在物体上的
___
和物体在力的方向上通过
_____
的乘积,叫做机械功,简称功。
2.
公式
:
______
。
3.
单位
:
_______
。1J=1N·m。
4.
常考功的估测
:从地上拿起一个鸡蛋缓缓举过头顶,大约做功1J;普通中学生从一楼走到三楼做功约为3000J;将地面上的九年级物理课本捡起来放到课桌上,人对课本做功约为2J。
W=Fs
力
距离
焦耳(J)
二、机械功率
1.
定义
:功与做功时间之
____
叫做功率,用字母P表示。
2.
物理意义
:表示
_________
的物理量。如某小轿车功率为66kW,表示小轿车1s内做功
_________
J。
3.
公式
:
______
。
4.
单位
:
________
。常用单位还有:千瓦(kW)。
换算关系:1kW=
____
W,1W=
___
J/s。
5.
常考功率估测
:普通中学生从一楼走到三楼的功率约为100W;普通中学生跳绳的功率约为75W。
比
做功快慢
6.6×10
4
P=W
/
t
1
瓦特(W)
10
3
1.
力对物体不做功的三种情况
夺分点拨
理解
举例
劳而无功
物体受到力的作用,但没有通过距离
推桌子时,未推动;搬石头时,未搬起
不劳无功
物体由于惯性而运动了一段距离,但物体没有受到力的作用
推铅球时,铅球离开手后,手对铅球不做功
垂直无功
物体运动的方向跟力的方向垂直
提着水桶水平前进,提水桶的力和水桶的重力不做功
2.
对功和功率的理解
:功表示做功的多少,功率表示做功的快慢。一个力做功的多少由功率和时间两个因素决定,功率大的做功不一定多,做功多的功率也不一定大。
3.
功率推导式P=Fv的应用
:适用于物体做匀速直线运动,其中v的单位是m/s。此公式对功率的实际应用有较大的意义,如汽车发动机的功率一定时,由F=P
/
v可知,牵引力与速度成反比,所以汽车爬坡时,司机采取的措施是换挡减速,以获取更大的牵引力。
示例
3
一位同学正在进行投掷实心球的训练,以下情境中,他对球做功的是( )
A.手拿球静止
B.手托球水平匀速直线运动
C.将球举起
D.抛出后的球在空中继续运动
双基突破
C
示例5
某人乘坐出租车在平直公路上匀速行驶,出租车的牵引力为3×103N,如图是他乘车到达目的地时的车费发票,求出租车在这段时间内牵引力的功率。
解:牵引力做的功:W=Fs=3×10
3
N×6×10
3
m=1.8×10
7
J,
出租车行驶的时间:t=10:05-10:00=5min=300s,
出租车在这段时间内牵引力的功率:P=W
/
t=1.8×10
7
J
/
300s=6×10
4
W。
知识点五 机械效率
一、有用功和额外功
1.
有用功
:完成某个任务时必须要做的功,用W有表示。
2.
额外功
:完成某个任务时,人们不需要但又不得不做的功,用W额表示。
3.
总功
:有用功和额外功之
____
叫做总功,用W
总
表示,即
_______________
。
和
W
总
=W
有
+W
额
二、机械效率
1.
定义
:有用功跟总功的
______
叫做机械效率,用字母η表示。
2.
公式
:
__________
。
【说明】任何机械不可避免地要做额外功,因此,机械效率总是小于1。
3.
提高机械效率的方法
:增大提升物体的重力(增大有用功);减小机械本身的重力(减小克服机械重力做的额外功);定时润滑(减小克服机械间的摩擦而做的额外功)。
比值
η=W
有
/
W
总
有用功与额外功的区分
:
看我们需要达到什么做功目的。例如:用桶将水从水井中提上来,克服水重做的是有用功,而克服桶重做的是额外功;如果是捞出掉入水井中的水桶,则克服桶重做的是有用功,而克服桶带出来的水的重力所做的功是额外功。
夺分点拨
示例
6
某同学做
“测滑轮组机械效率”
实验时,用图中所示的滑轮,组装成滑轮组,请在图中画出使用该滑轮组时最省力的绕法。用此滑轮组将重为3.6N的物体匀速提起时,拉力的功率为0.36W,滑轮组的机械效率为75%。(忽略摩擦及绳重)求:
(1)绳子自由端移动的速度和动滑轮的总重;
(2)若用此滑轮组提起小于3.6N的重物时,其机械效率将如何改变?说明理由。
双基突破
解:绕法如图所示,绳子段数n=4。
(1)因为η=W
有
/
W
总
=Gh
/
Fs=Gh
/
Fnh=G
/
nF,
所以拉力:F=G
/
nη=3.6N
/(
4×75%
)
=1.2N,
由于P=Fv,所以绳子自由端移动的速度:v=P
/
F=0.36W
/
1.2N=0.3m/s,
由于忽略摩擦及绳重,则机械效率:η=W
有
/
W
总
=G
h
/(
G
h
+G
动h
)
=G
/(
G+G
动
)
,
所以动滑轮总重:G
动
=G
/
η-G=3.6N
/
75%-3.6N=1.2N;
(2)机械效率减小;
由于忽略摩擦及绳重,则机械效率:η=W
有
/
W
总
=Gh
/(
Gh+G
动
h
)
=G
/(
G+G
动
)
=1
/(
1+G
动
/
G
)
,
所以当提升的物体重力减小时,滑轮组机械效率减小。
(或者当提升物体的重力减小时,有用功减小,额外功不变,故其机械效率减小)
考法
·
聚焦重难点
焦点
1
杠杆平衡条件的应用(重点、难点)
样题1
如图所示,在“探究杠杆平衡条件”的实验中,轻质杠杆上每个小格长度均为2cm,在B点竖直悬挂4个重均为0.5N的钩码,当在A点用与水平方向成30°角的动力F拉杠杆时,杠杆在水平位置平衡。对该杠杆此状态的判断,下列说法中正确的是( )
A.杠杆的动力臂为8cm
B.该杠杆为费力杠杆
C.该杠杆的阻力大小为0.5N
D.动力F的大小为1.5N
B
[解析]
当动力在A点斜向下拉(与水平方向成30°角)动力臂:L
1
=1
/
2OA=1
/
2×4×2cm=4cm,故A错误;阻力臂:L
OB
=3×2cm=6cm>L
1
,即阻力臂大于动力臂,该杠杆为费力杠杆,故B正确;该杠杆的阻力大小:G=4×0.5N=2N,故C错误;根据杠杆的平衡条件得,G×L
OB
=F×L
1
,代入数据,2N×8cm=F×4cm,解得,F=4N,故D错误。故选B。
1.如图所示,杠杆在拉力的作用下水平平衡。现将弹簧测力计绕c点从a位置转动到b位置的过程中,杠杆始终保持水平平衡,则拉力F的变化情况是( )
A.一直变大
B.一直变小
C.一直不变
D.先变大后变小
对应训练
A
[解析]
将弹簧测力计绕c点从a位置转动到b位置的过程中,钩码的重力不变,其力臂不变,即阻力与阻力臂的乘积不变;将弹簧测力计绕c点从a位置转动到b位置的过程中,拉力F的力臂逐渐变小,由杠杆的平衡条件F
1
L
1
=F
2
L
2
可知,拉力F逐渐变大。故选A。
焦点
2
杠杆作图(重点)
样题
2
如图所示是用起子开启瓶盖的情景,此时起子可以看作是一个支点为O的杠杆,请在图中画出动力F
1
的力臂L
1
和阻力F
2
。
2.如图所示,轻质杠杆的A点挂一重物G,绳受的拉力为F
2
,O为杠杆的支点。请在杠杆的端点B处画出使杠杆保持静止的最小的力F
1
的示意图,并作出F
2
的力臂l
2
。
对应训练
焦点
3
滑轮(组)、斜面的相关计算(重点、难点)
样题
3
(2017·达州)用如图所示滑轮组拉着重为30N的物体A匀速前进0.2m,则绳子自由端移动的距离为
____
m;若物体A与地面的摩擦力为9N,则拉力所做的有用功为
___
J;若实际拉力F=4N,则该滑轮组的机械效率为
___
%。
0.6
1.8
75
3.如图所示,甲、乙两个滑轮组,其中每个滑轮的质量都相同,分别用拉力F
1
、F
2
将重物G
1
、G
2
提升相同高度,不计绳重和摩擦,下列说法正确的是( )
A.若G
1
=G
2
,则拉力F
1
、F
2
做的总功相同
B.若G
1
=G
2
,则拉力F
2
做的有用功多
C.若G
1
>G
2
,则甲的机械效率大于乙的机械效率
D.若G
1
>G
2
,则甲、乙两个滑轮组的机械效率相等
对应训练
C
4.如图所示,在水平路面上行驶的汽车通过滑轮组拉着重G=9×104N的货物A沿斜面向上匀速运动。货物A的速度为v=2m/s,经过t=10s,货物A竖直升高h=10m。已知汽车对绳的拉力F的功率P=120kW,不计绳、滑轮的质量和摩擦,求:
(1)10s内汽车对绳的拉力所做的功;
(2)汽车对绳的拉力大小;
(3)斜面的机械效率。
解:(1)由P=W
/
t可得,10s内汽车对绳的拉力所做的功:W=Pt=1.2×10
5
W×10s=1.2×10
6
J;
(2)10s内货物移动的距离:s
物
=vt=2m/s×10s=20m,由图可知,n=3,拉力端移动距离:s=3s
物
=3×20m=60m,
由W=Fs可得,汽车对绳的拉力大小:F=W
/
s=1.2×10
6
J
/
60m=2×10
4
N;
(3)滑轮组对重物的拉力:F
拉
=3F=3×2×10
4
N=6×10
4
N,
斜面的机械效率:η=W
有
/
W
总
×100%=Gh
/
F
拉
s
物
×100%=
(
9×10
4
N×10m
)/(
6×10
4
N×20m
)
×100%=75%。
焦点
4
动能和势能的影响因素及相互转化(重点)
样题
4
如图所示,小球从A点摆动到C点的过程中,(不计空气阻力)下列说法正确的是( )
A.从A到B的过程中,动能增大,重力势能减小
B.从A到B的过程中,动能减小,重力势能增大
C.从B到C的过程中,动能增大,重力势能增大
D.从B到C的过程中,动能减小,重力势能减小
A
5.2019年1月3日,
“嫦娥四号”实
现了人类探测器首次在月球背面软着陆,
“嫦娥四号”
探测器在距离月球表面100米高处悬停,对月球表面识别,并自主避难,选择相对平坦的区域后,开始缓慢地竖直下降,最后成功软着陆。从距离月球表面100米到软着陆在月球表面的过程中,
“嫦娥四号”探
测器的重力势能
______
,机械能
______
。(均选填
“增大”“不变”或“减小”)
对应训练
减小
减小
考场
·
走进达州中考
命题点
1
杠杆平衡条件的应用
1.(2016·达州)如图所示,杠杆处于平衡状态,且每个钩码的质量相同,若将两边的钩码分别向支点移动相同的距离后,则杠杆
____
(选填“A”或“B”)端会下沉。
B
[解析]
假如一个钩码的重力是G,则原来杠杆在水平位置处于平衡状态,此时作用在杠杆上的力分别为3G、2G,其对应的力臂分别为L
1
、L
2
,根据杠杆的平衡条件可得:3G×L
1
=2G×L
2
,由此可知,L
1
2G,所以3GΔL>2GΔL,所以3GL
1
-3GΔL<2GL
2
-2GΔL。因此杠杆将向B端即右端倾斜。故若将两边的钩码分别向支点移动相同的距离后,则杠杆B端会下沉。
命题点
2
杠杆、滑轮(组)作图
2.(2019·达州)轻质杠杆OABC能够绕O点转动,已知OA=BC=20cm,AB=30cm,在B点用细线悬挂重为100N的物体G,为了使杠杆在如图所示的位置平衡,请在杠杆上作出所施加最小动力的图示(不要求写出计算过程)。
[解析]
根据杠杆的平衡条件,要使力最小,则动力臂应最长,即连接OC为最长的力臂,力的方向与OC垂直且向上,根据勾股定理和全等三角形定理可得,动力臂OC=50cm,故根据杠杆平衡条件可得:F
1
×OC=G×OA,代入数值可得:F
1
×50cm=100N×20cm,解得:F
1
=40N,选取标度为20N,过C点作出最小动力,使线段长度为标度的2倍。
3.(2015·达州)如图所示是一轻质杠杆,O是支点,为了使杠杆在此位置平衡,请画出在A点所施加的最小动力F及其力臂L。
[解析]
连接OA,则OA是最长的力臂,作OA的垂线,物体对杠杆的力使杠杆向逆时针方向转动,所以F应使其向顺时针方向转动。
4.(2012·达州)请你在如图中画出用滑轮组提升重物的最省力的绕绳方法。
5.(2014·达州)初三学生小华从一楼步行到三楼,用时0.2min,他步行的路程约为12m,升高高度为6m,下列估算正确的是( )
A.小华步行的平均速度约为0.5m/s
B.小华步行的平均速度约为0.75m/s
C.小华重力做的功约为3000J
D.小华重力做的功约为4500J
命题点
3
功、功率的简单计算
C
6.(2013·达州)中学生小华在一次跳绳的体能测试中,1min内跳了120次,每次跳离地面的高度约为5cm,则他跳绳时的功率最接近( )
A.5W
B.50W
C.500W
D.5000W
B
7.(2017·达州)如图所示,用20N的水平拉力F拉滑轮,可以使重15N的物体A以0.2m/s的速度在水平地面上匀速运动,物体B重8N,弹簧测力计的示数为3N且保持不变。若不计轮重、弹簧测力计重、绳重和滑轮的摩擦,则下列说法中正确的是( )
A.地面受到的摩擦力为10N
B.滑轮移动的速度为0.4m/s
C.在2s内绳子对物体A所做的功为4J
D.水平拉力F的功率为4W
命题点
4
滑轮(组)、斜面的相关计算
C
【解析】
图中使用的是动滑轮,设物体A受到绳子的拉力为F
左
,则拉力F=2F
左
,物体A受到向左的拉力:F
左
=1
/
2F=1
/
2×20N=10N,而f
B
=F
示
=3N,物体A受到向左的拉力等于地面对它的摩擦力f地加上B对它的摩擦力f
B
,即F
左
=f
地
+f
B
,所以地面受到的摩擦力:f
地
=F
左
-f
B
=10N-3N=7N,故A错误;滑轮移动的速度:v
轮
=1
/
2v=1
/
2×0.2m/s=0.1m/s,故B错误;物体A移动的距离:s=vt=0.2m/s×2s=0.4m,对A做的功:W=F
左
s=10N×0.4m=4J,故C正确;水平拉力F的功率:P=Fv
轮
=20N×0.1m/s=2W,故D错误。故选C。
8.(2015·达州)用如图所示的甲、乙两滑轮组分别把相同的物体匀速提升相同的高度,两装置的机械效率分别为η
甲
、η
乙
,拉力做的功分别为W
甲
、W
乙
,若滑轮规格相同,不计绳重及摩擦,下列说法正确的是( )
A.W
甲
W
乙
η
甲
>η
乙
C.W
甲
=W
乙
η
甲
=η
乙
D.W
甲
η
乙
C
【解析】
由图可知,n
甲
=5,n
乙
=4,不计绳重及摩擦,绳子受的拉力:F
甲
=1
/
5(G
物
+G
轮
),F
乙
=1
/
4(G
物
+G
轮
),绳子自由端移动的距离s=nh,提升物体的高度h相同,s
甲
=5h,s
乙
=4h,拉力做的功:W
甲
=F
甲
s
甲
=1
/
5×(G
物
+G
轮
)×5h=(G
物
+G
轮
)h,W
乙
=F
乙
s
乙
=1
/
4(G
物
+G
轮
)×4h=(G
物
+G
轮
)h,所以W
甲
=W
乙
;动滑轮重相同,提升的物体重和高度相同,W
额
=G
轮
h,W
有
=G
物
h,滑轮规格相同,不计绳重及摩擦,利用滑轮组做的有用功相同、额外功相同,总功相同,由η=W
有
/
W
总
可知,滑轮组的机械效率相同。故选C。
9.(2019·达州)救援车工作原理如图所示,当车载电机对钢绳施加的拉力F大小为2.5×10
3
N时,小车A恰能匀速缓慢地沿斜面上升。已知小车A的质量为1t,斜面高为2m,斜面长为5m(不计车长、钢绳重、动滑轮重、钢绳与滑轮间的摩擦和滑轮与轴间的摩擦,g取10N/kg)。在小车A由水平路面被拖上救援车的过程中,钢绳所做的有用功为
______
J,整个装置的机械效率为
___
,小车A与斜面间的摩擦力大小为
______
N。
2×10
4
80%
1×10
3
【解析】
车的重力:G=mg=1×10
3
kg×10N/kg=1×10
4
N,钢绳做的有用功:W
有
=Gh=1×10
4
N×2m=2×10
4
J;不计车长,拉力端移动距离:s=2L=2×5m=10m,拉力做的总功:W
总
=Fs=2.5×10
3
N×10m=2.5×10
4
J,整个装置的机械效率η=W
有
/
W
总
×100%=
(
2×10
4
J
)/(
2.5×104J
)
×100%=80%;不计钢绳重、动滑轮重、钢绳与滑轮间的摩擦和滑轮与轴间的摩擦,克服小车A与斜面间的摩擦做的功为额外功,W
额
=W
总
-W
有
=2.5×10
4
J-2×10
4
J=5×10
3
J,由W
额
=fL可得,摩擦力:f=W
额
/
L=5×10
3
J
/
5m=1×10
3
N。
10.(2014·达州)如图所示,用F为40N的拉力,通过滑轮组拉着重为300N的物体A在水平面上以0.4m/s的速度向左做匀速直线运动。物体受到的摩擦力是物重的0.3倍,滑轮组的机械效率是
_____
,拉力的功率是
____
W。
75%
48
【解析】
摩擦力:f=0.3G=0.3×300N=90N,滑轮组的机械效率:η=W
有
/
W
总
=fs
/
F·3s=f
/
3F=90N
/(
3×40N
)
=75%;拉力移动速度:v=3v
物
=3×0.4m/s=1.2m/s,拉力的功率:P=Fv=40N×1.2m/s=48W。
11.(2015·达州)某工人用如图所示的装置把一重为1200N的箱子从斜面底端匀速拉到顶端用时10s,已知斜面长6m、高2m,此装置的机械效率为80%(滑轮重、绳重、滑轮与绳之间的摩擦均不计)。求:
(1)拉力F;
(2)拉力F做功的功率;
(3)箱子和斜面间的摩擦力。
解:(1)由图可知滑轮装置是一个动滑轮,
绳端移动的距离:s′=2s=2×6m=12m,
有用功:W
有
=Gh=1200N×2m=2400J,
根据η=W
有
/
W
总
=W
有
/
Fs′可得,
拉力:F=W
有
/
ηs′=2400J
/(
80%×12m
)
=250N;
(2)拉力做的功:W
总
=Fs′=250N×12m=3000J,
拉力做功的功率:P=W
总
/
t=3000J
/
10s=300W;
(3)根据W
总
=W
有
+W
额
可得,
克服摩擦力做的额外功:
W
额
=W
总
-W
有
=3000J-2400J=600J,
根据W=fs可得,
箱子和斜面间的摩擦力:f=W
额
/
s=600J
/
6m=100N。