- 2021-04-12 发布 |
- 37.5 KB |
- 33页


申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
变频器培训(第四讲掌握要点控变频)
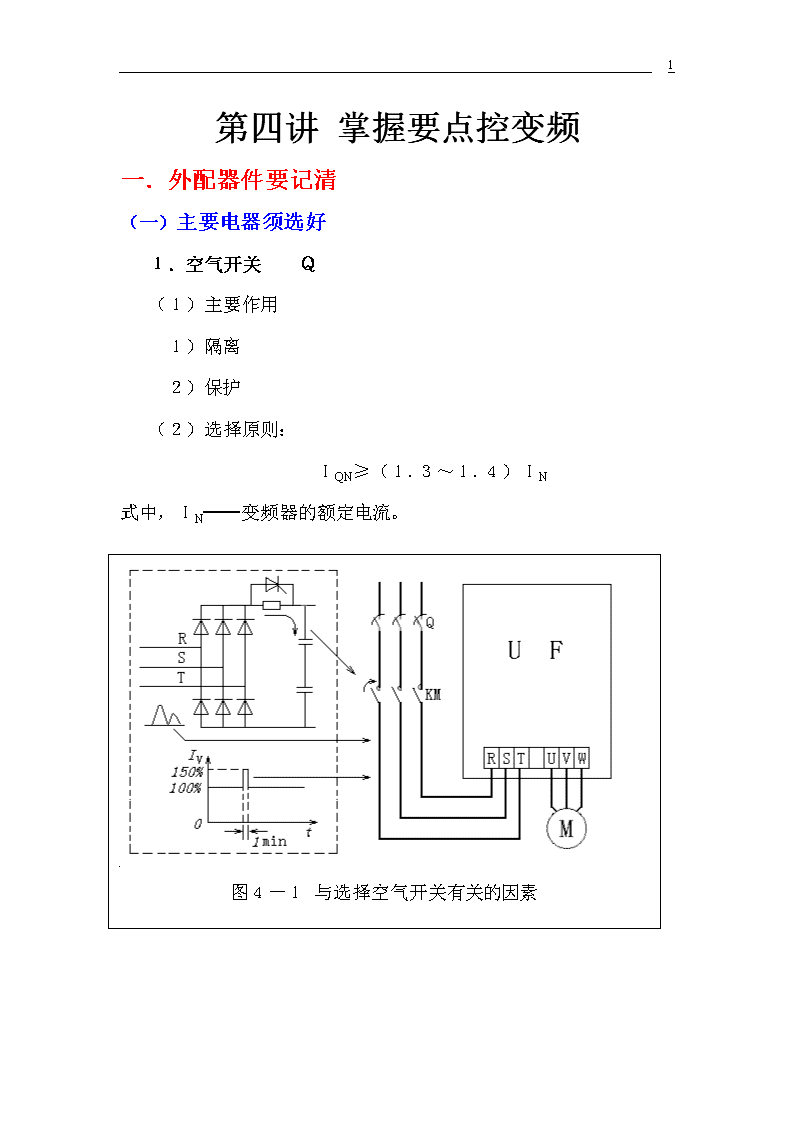
33 第四讲 掌握要点控变频 一.外配器件要记清 (一)主要电器须选好 . 图4-1 与选择空气开关有关的因素 1.空气开关 Q (1)主要作用 1)隔离 2)保护 (2)选择原则: IQN≥(1.3~1.4)IN 式中,IN──变频器的额定电流。 33 2.接触器KM (1)主要作用 1)可通过按钮开关方便地控制变频器的通电与断电; 2)变频器发生故障时,可自动切断电源。 (2)选择原则 IKN≥IN 3.输出接触器 IKN≥1.1IMN 式中,IMN──电动机的额定电流。 4.主电路线径的选择 (1)电源与变频器之间的导线 和同容量普通电动机的电线选择方法相同。 图4-2 输出线路电压降 (2)变频器与电动机之间的导线 要求: ΔU≤(2~3)%UN 33 (一)主要电器须选好 (二)供电部门不能恼 图4-3 滞后电流与谐波电流的功率 1.功率因数的概念 PF= =DF•KP 式中,PF──功率因数; DF──位移因数(即cosφ); KP ──畸变因数。 33 2.变频器的功率因数 图4-4 输入电流的波形及其谐波分析 (a)输入电路 (b)电压波形 (c)输入电流波形 (d)输入电流的频谱分析 33 3.功率因数的改善 (1)接入交流电抗器 图4-5 交流电抗器 a)在电路中的接法 b)构造 可将功率因数提高至(0.75~0.85); 33 图4-6 直流电抗器 (a)在电路中的接法 (b)构造 (2)直流电抗器 可提高功率因数至0.9。 如交、直流电抗器共用,则可提高功率因数至0.95。 33 (一)主要电器须选好 (二)供电部门不能恼 (三)睦邻友好抗干扰 图4-7 电动机侧的波形 (a)电压波形 (b)电流波形 电动机的电流波形 1.电路耦合方式 (1)通过电源网络传播; (2)通过漏电流传播。 削弱方法:(1)电源隔离; (2)信号隔离。 图4-8 电路传播与隔离 33 图4-9 电磁感应与静电感应 2.感应耦合方式 削弱方法: 图4-10 绞线与屏蔽 合理布线 (1)远离(2)相绞(3)屏蔽 (4)不平行 33 3.空中幅射方式 图4-11 空中辐射与接地 削弱方法:(1)准确接地; (2)接入滤波器。 图4-12 滤波器抗干扰 33 (一)主要电器须选好 (二)供电部门不能恼 (三)睦邻友好抗干扰 (四)制动电路勿硬套 1.制动电阻值的粗略算法 IB=~ RB=~ 2.制动电阻容量的确定 图4-13 能耗电路 (1)制动电阻的耗用功率PB0 PB0= (2)制动电阻的容量 PB=PB0 ∕γB 式中,γB──制动电阻容量的修正系数。在一般情况下: γB=3~8 电动机容量小时取大值,大时取小值。 33 3.按照说明书选择制动电阻时的注意事项 例如,艾默生TD3000系列变频器说明书中,对于配用电动机容量为22kW、30kW和37kW的变频器,所提供的制动电阻规格,都是3kW、20Ω。 (1)制动电流 通常,制动单元在直流电压为700V时导通,则制动电流为: IB==35A (2)电动机的额定电流 设所用电动机为Y系列的4极电动机,则: PMN(kW) IMN(A) IB∕IMN TB∕TMN 22 42.5 0.82 1.64 30 56.8 0.62 1.24 37 69.8 0.50 1.00 (4)修正系数 PB0==24500W=24.5kW 修正系数为: γB===8.16 33 4. 制动单元的构成 用交流接触器代替功率管的要点 图4-14 制动单元 图4-15 用接触器作制动单元 在起制动不很频繁的情况下,制动单元的执行器件也可以用交流接触器来代替,如图所示。 33 一.外配器件要记清 二.常规控制勿看轻 (一)正、反控制基本功 图4-16 不妥的控制方式 1.不妥的起动方式 2.规范的正转控制 图4-17 由继电器控制正转运行的电路 a)主电路 b)控制电路 (1)继电器控制 33 33 (2)利用自锁功能 图4-18 利用自锁功能 图4-19 更换旋转方向 3.更改旋转方向 或 更改功能预置:“正转有效”→“反转有效” 33 (一)正、反控制基本功 (二)切换控制勿朦胧 1.切换的必要性 (1)部分设备不允许停机:如许多场合下的风机,称为故障切换。 图4-20 切换主电路 (2)在供水系统中,为了减少设备投资,采用由一台变频器控制多台水泵(1控X)的方案,称为运行切换。 2.切换主电路 要求: KM2与KM3绝对不允许同时接通,最好采用机械互锁。 图4-21 变频器输出端与工频电源相接 33 3.电动机在切断电源后的过渡过程 (1)电磁过渡过程 图4-22 电动势衰减过程 定子绕组:电流和磁场立即消失; 转子绕组:因自成回路,故电流和磁场不能立即消失,但不交变; 状态:转子是直流磁场,定子是三相绕组,是同步发电机状态。 时间常数:τE≈0.6s 图4-23 机械过渡过程 (2)机械过渡过程 33 时间常数:τM≥2min 4.故障切换的控制 特点 (1)切换瞬间的频率不定 (2)切换应在电磁过渡过程基本结束后进行 (3)切换时电动机的转速不宜过低 一般说来,电动机在切换时的转速(指KM3闭合时的转速)以不低于额定转速的80%为宜。 切换控制示例 图4-24 切换电路示例 (a)主电路 (b)控制电路 33 5.供水系统的运行切换 (1)工况 首先由变频器控制“1号泵”运行;当用水量增大,变频器的运行频率已经达到上限频率(通常等于工频)时,如果在确认时间(通常为2~5min)内,水压始终低于“目标压力”时,则将“1号泵”切换为工频运行。 同时,变频器的输出频率迅速降为0Hz,并切换至“2号泵”,使“2号泵”变频起动,以此类推。 (2)切换特点 A.切换时变频器的工作频率接近工频 图4-25 水泵断电后的过渡过程 图4-31 电源电压与定子电动势的相位关系 B.切换时电磁过渡过程远未结束 时间常数:τM≥(0.7~1.0)s 33 图4-26 电源电压与定子电动势的相位关系 (3)必须考虑定子电动势和电源电压的相位关系。 6.“差频同相”切换的原理与方法 图4-27 同相点的相对移动 (1)基本出发点 当变频器的输出频率与电源频率存在差异时,两者的同相点之间将不断地作相对移动,如图4-33所示。这个特点,十分有利于“捕捉”到同相点。 33 (2)差频同相的实施 (1)设置“频段陷阱” 要求在切换时,变频器的输出频率与电源频率之间应该有一个频率差Δƒ。这可以通过预置变频器的上限频率来实现。例如,变频器的上限频率预置为49.6Hz,则Δƒ=0.4Hz。 事实上,从节能的观点出发,变频供水时,工作在50Hz是并不可取的。因为,同样运行在50Hz下,变频运行比工频运行时的功耗要大一些。 (2)切换的工作过程 当供水系统中变频器的运行频率达到上限频率,并且经过确认时间,确认需要切换时,供水系统发出切换指令,开始“捕捉”同相点。 当“捕捉”到同相点时,便断开KM2,并在延时100ms后,接通KM3,切换工作即告完成。 33 (3)关于切换时间(100ms) 转速方面 根据计算,当KM2切断后100ms的瞬间,电动机的转速在额定转速的86.7%以上,满足切换转速不低于80%nMN的要求; 相位方面 一方面,100ms是电源电压的5个整周期,如图4-31所示。 只要适当加入提前量Δt,就可以使切换瞬间基本上实现电源电压与定子绕组电动势同相的目的。 图4-28 差频同相时的瞬间压差 33 一.外配器件要记清 二.常规控制勿看轻 三.闭环控制须用心 (一)自动调整用闭环 图4-29 空气压缩机变频调速系统图 1.反馈信号的接入法 2.PID控制的工作过程 如XF>XT→(XT-XF)<0 →ƒX↓→nX↓→p↓ →直至与所要求的目标压力相符(XF≈XT)为止。 如XF<XT→(XT-XF)>0 →ƒX↑→nX↑→p↑ →直至与所要求的目标压力相符(XF≈XT)为止。 33 (一)自动调整用闭环 (二)又快又稳PID搬 图4-30 闭环控制出现的问题 1.问题的提出 ∵ XG =XT -XF ∴ XT -XF≈0 →XG≈0 →fX≈0 系统不能工作. 33 2.比例增益环节(P) 将(XT-XF)进行放大后再作为频率给定信号: 图4-31 比例放大前后各量间的关系 XG=KP(XT-XF) (XT-XF)= =ε ε──静差 设:在某压力下,所需XG=4V 则: KP 10 100 1000 10000 XT-XF 0.4 0.04 0.004 0.0004 结论: KP越大,则静差ε越小。 33 3.积分环节(I) 4.微分环节(D) 图4-32 P、I、D的综合作用示意图 (a)P调节(b)振荡现象(c)PI调节(d)PID调节 33 (一)自动调整用闭环 (二)又快又稳PID搬 (三)目标大小变送看 图4-33 压力传感装置的接线 (a)压力传感器 (b)远伟压力表 1.压力传感装置 33 2.目标值的确定 设:(1)目标压力为0.6MPa (2)压力传感器的信号范围是4~20mA 则:(1)压力传感器的量程为0~1MPa时,目标值的大小是: XT=60% (2)压力传感器的量程为0~5MPa时,目标值的大小是: XT=12% 图4-34 目标值的确定 (a)量程为0~1MPa (b)量程为0~5MPa 3.变频器的PID功能有效后的特点 (1)频率给定输入端的功能 转变为目标信号的输入端,或反馈信号的输入端(日立)。 33 (2)变频器的升降速功能 无效。 33 4.反馈的逻辑 (1)负反馈 目标信号与反馈信号相减,故: 反馈量越大→要求给定信号越小 →转速越低 通常称为“正逻辑”,如曲线① 典型实例:空压机的压力控制 (2)正反馈 目标信号与反馈信号相加,故: 反馈量越大→要求给定信号越大 →转速越高 通常称为“负逻辑”,如曲线② 典型实例:风机的温度控制 图4-35 反馈逻辑 33 5.PID功能的调试 图4-36 手动调试电路 (1)手动调试 用一个模拟的反馈信号去与目标信号比较: 当XT<XF时,fX将缓慢地不断下降,直至fX=0Hz为止。 当XT>XF时,fX将缓慢地不断上升,直至fX=fHHz为止。 (2)系统调试 如反应过慢,则:加大P,或减小I; 如发生振荡,则:减小P,或加大I。 33 6.外接PID调节器与变频器的配合 特点: (1)变频器的PID功能无效,故:变频器的升降速功能有效。 图4-37 外接PID与变频器的配合 (2)目标值由PID调节器的键盘给定; (3)压力传感器测得的当前值接至PID调节器的反馈量输入端; (4)PID调节器的输出信号接至变频器的给定频率信号输入端; 33 (5)PID调节器的比例功能通常是“比例带”: 图4-38 比例与比例带 (a)输出与输入的比例关系 (b)比例带的概念 比例带──按比例变化的区域,数值上等于比例增益的倒数。查看更多