- 2021-05-28 发布 |
- 37.5 KB |
- 23页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
电工技术 异步电机
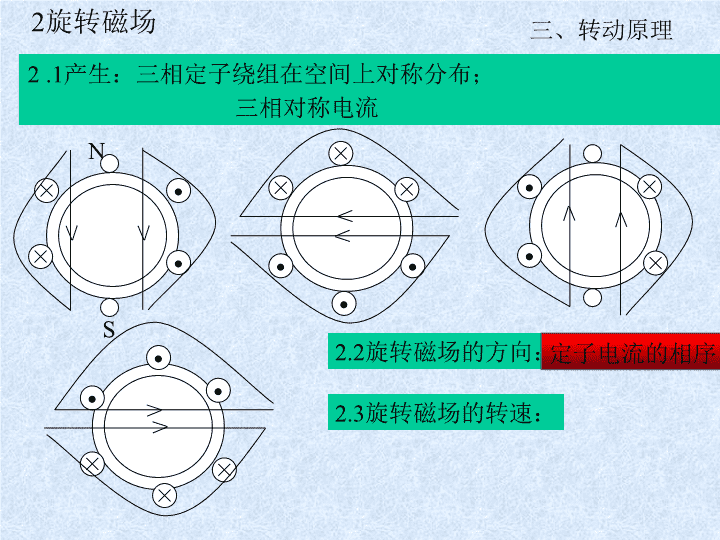
第三章 异步电动机 第二节 结构与原理 三、转动原理 1转子转动原理:旋转磁场切割转子的导条,在转子的 导条上感应出电动势,由于转子自行构成闭合回路, 所以在转子上感应出电流来;旋转磁场对转子电流 产生力矩的作用,力矩的方向与旋转磁场的方向相 同;这样,转子在电磁力矩的作用下以一定的转速 顺着旋转磁场的方向旋转起来。 %100 0 0 n nns0nn 转差率 三、转动原理 2 .1产生:三相定子绕组在空间上对称分布; 三相对称电流 N S 2.2旋转磁场的方向:定子电流的相序 2.3旋转磁场的转速: 2旋转磁场 N S A BC A B C 2.3旋转磁场的转速: p fn 1 0 60 P52 二、从磁路到电路的基本分析方法 1、磁路分析——电磁关系式 12 222 111 44.4 44.4 sff NfE NfE m m 1 0 0 00 2 6060 )( sfpn n nnnnpf 练习: 起动瞬间: 额定负载时: s=1,f2= f1=50Hz s=0.01~0.09,f2= f1=0.5~4.5Hz 第3节 电磁过程和机械特性 一问题的提出: cosBISM 22 cosIkM 2、电路分析——电压电流方程式 u1 + i1 R1 e1 + i2 R2 e2 + 2222 11111 )(0 )( EjXRI EjXRIU e1+ +e2 11 EU )( 2222 jXRIE 202122222 22 sXLfsLfLX 2120 2 LfX )( cos 2 20 2 2 2 2 sXR R 22 cosIkM mNfE 111 44.4 )()( 2 20 2 2 20 2 2 2 2 2 2 sXR sE XR EI )( 2 20 2 2 2 12 sXR UsRkM 三、电磁转矩和机械特性 1.电磁转矩 2.机械特性 2.1运行过程与稳定性分析 t nJtJMM L d d d d ' (1)加速: (2)加速: (3)稳定: 1 2 1——2 2——N N F 0 LF MM 0 LMM结论:2O段为稳定运行 2.2额定转矩 N N N N n P n PM 9550 602 N 602 M Nn MP 2.3起动转矩 2 20 2 2 2 12 XR URkTst 影响因素:U1、R2 起动系数: N st T T 1.4~2.2 T st 2.4最大转矩 20 2 1 max 2X UkM 影响因素:U1 过载系数: NM M max 20 2 X Rss m 2.0~2.2 maxL MM 带不动负载,停机,称“闷车” 问题:转子电流达到最大,6~7倍I2N 结构: 原理: %100 0 0 n nns0nn 转差率 旋转磁场的转速: p fn 1 0 60 电磁转矩 12 222 111 44.4 44.4 sff NfE NfE m m 11 EU )( 2222 jXRIE )( cos 2 20 2 2 2 2 sXR R )()( 2 20 2 2 20 2 2 2 2 2 2 sXR sE XR EI )( 2 20 2 2 2 12 sXR UsRkT 机械特性 )( 2 20 2 2 2 12 sXR UsRkT t nJtJMM L d d d d ' N N N N n P n PT 9550 602 N 602 M Nn MP 2 20 2 2 2 12 XR URkTst 20 2 1 max 2X UkT 1.起动转矩是否要大于负载阻转矩? 2.最大转矩是否要大于最大负载阻 转矩? 3.电动机为什么应在额定转矩下运 行? 4. P60例 第4节 起动、调速和制动一、起动 1 起动定义: 起动电流 起动时间 起动转矩 2 起动性能: T st 2 起动方法: 1 直接起动 3绕线式异步电动机的起动 特点 存在问题 应用范围 2 降 压 起 动 小容量 思考:如何解决起动问题? •定子串电阻、电抗 •Y—起动 •自耦降压起动 空轻载起动 大容量、不能用 Y —起动 须满载起动: 起重机、吊车等 链接 链接 二调速 1定义: 2 原理: 3方法 变频调速 变极调速 变转差率调速 %100 0 0 n nns p fssnn 1 0 60)1()1( 三 反转与制动 1 反转: 2 制动: 起动时:Y接 正常工作时:接 uAB LI uAB LYI Z U AB 3 Z U AB3 LILYI 3 1 2 20 2 2 2 12 XR URkTst 影响因素:U1、R2 T st查看更多