- 2021-04-17 发布 |
- 37.5 KB |
- 55页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
试题君之每日一题君2017年高考物理(2月20-26日)
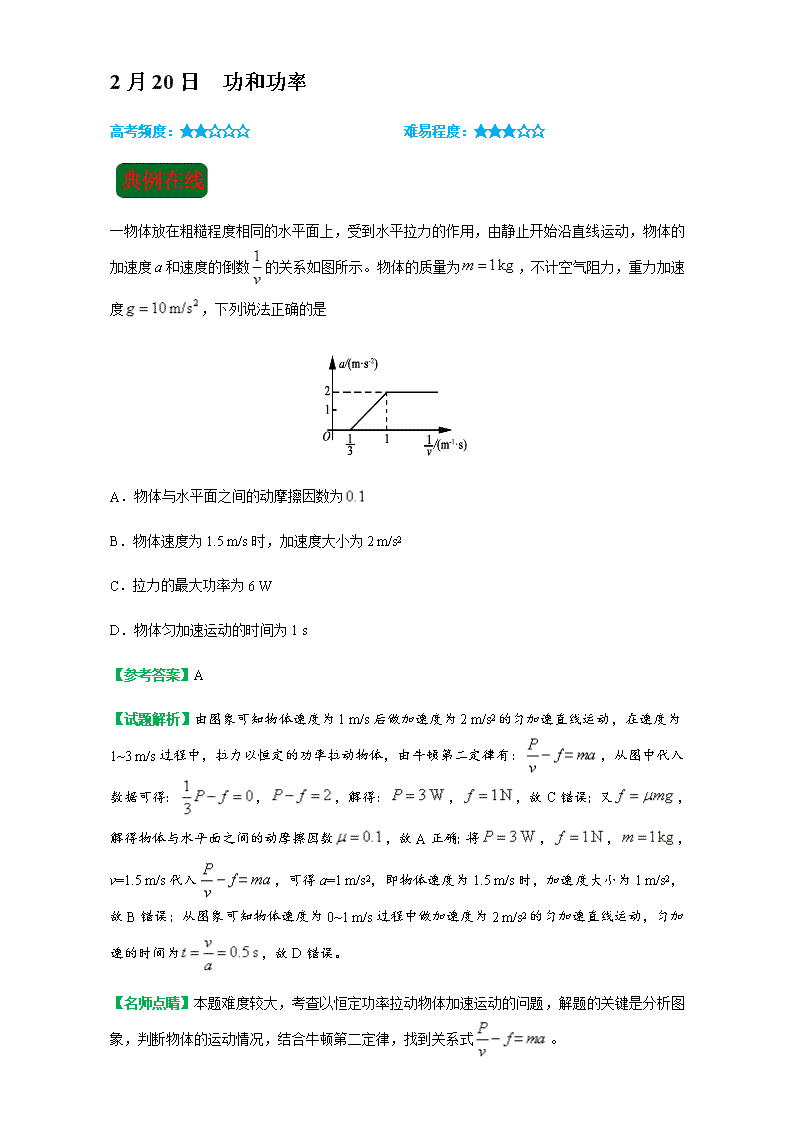
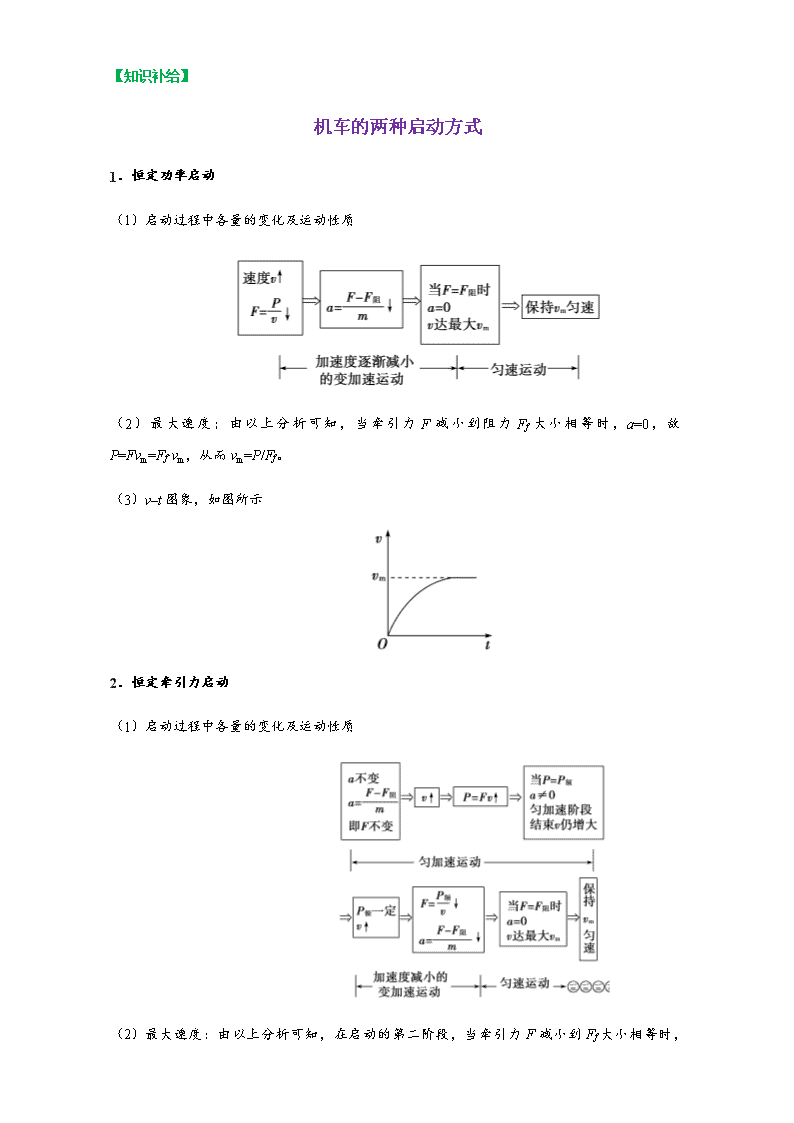
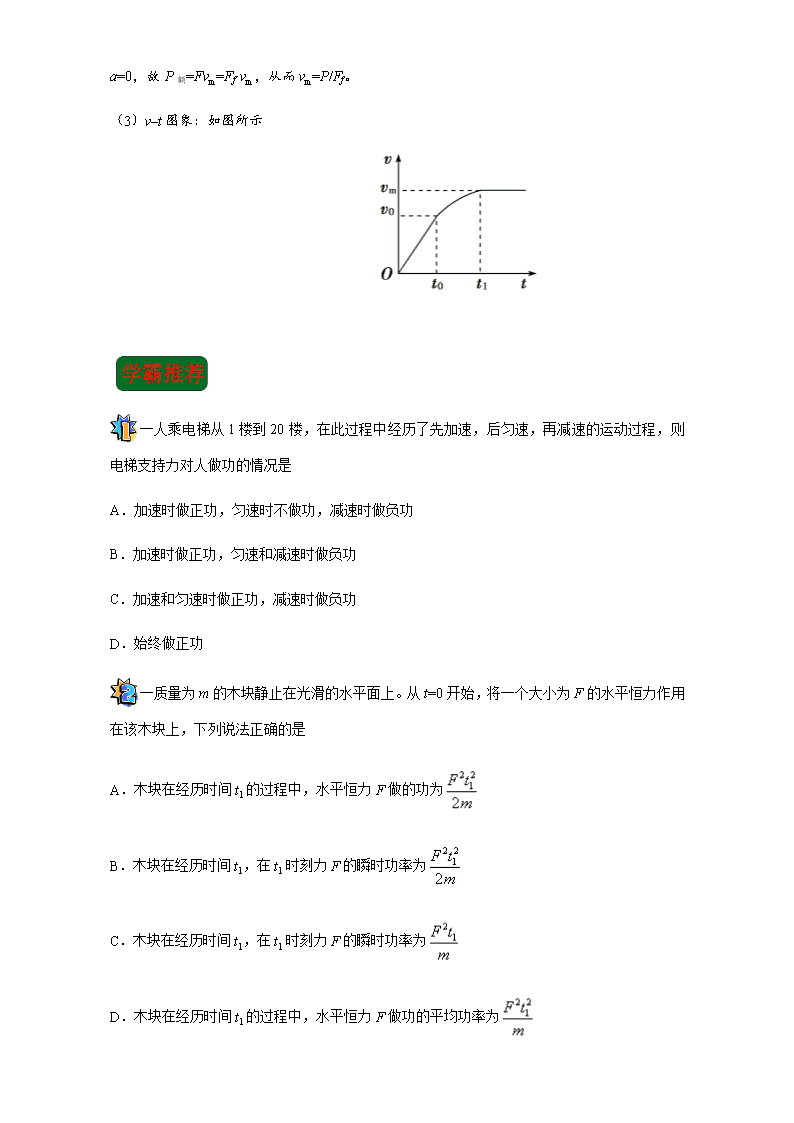
2 月 20 日 功和功率 高考频度:★★☆☆☆ 难易程度:★★★☆☆ 一物体放在粗糙程度相同的水平面上,受到水平拉力的作用,由静止开始沿直线运动,物体的 加速度 a和速度的倒数 1 v 的关系如图所示。物体的质量为 1kgm ,不计空气阻力,重力加速 度 2s10 m/g ,下列说法正确的是 A.物体与水平面之间的动摩擦因数为0.1 B.物体速度为 1.5 m/s时,加速度大小为 2 m/s2 C.拉力的最大功率为 6 W D.物体匀加速运动的时间为 1 s 【参考答案】A 【试题解析】由图象可知物体速度为 1 m/s后做加速度为 2 m/s2的匀加速直线运动,在速度为 1~3 m/s过程中,拉力以恒定的功率拉动物体,由牛顿第二定律有: =P v f ma ,从图中代入 数据可得: 1 3 0P f , 2P f ,解得: 3WP , 1Nf ,故 C错误;又 f mg , 解得物体与水平面之间的动摩擦因数 0.1 ,故 A正确;将 3WP , 1Nf , 1kgm , v=1.5 m/s 代入 =P v f ma ,可得 a=1 m/s2,即物体速度为 1.5 m/s时,加速度大小为 1 m/s2, 故 B错误;从图象可知物体速度为 0~1 m/s过程中做加速度为 2 m/s2的匀加速直线运动,匀加 速的时间为 0.5 svt a ,故 D错误。 【名师点睛】本题难度较大,考查以恒定功率拉动物体加速运动的问题,解题的关键是分析图 象,判断物体的运动情况,结合牛顿第二定律,找到关系式 =P v f ma 。 【知识补给】 机车的两种启动方式 1.恒定功率启动 (1)启动过程中各量的变化及运动性质 (2)最大速度;由以上分析可知,当牵引力 F减小到阻力 Ff大小相等时,a=0,故 P=Fvm=Ff·vm, 从而 vm=P/Ff。 (3)v–t图象,如图所示 2.恒定牵引力启动 (1)启动过程中各量的变化及运动性质 (2)最大速度:由以上分析可知,在启动的第二阶段,当牵引力 F减小到 Ff大小相等时, a=0,故 P 额=Fvm=Ff·vm,从而 vm=P/Ff。 (3)v–t图象:如图所示 一人乘电梯从 1楼到 20楼,在此过程中经历了先加速,后匀速,再减速的运动过程,则 电梯支持力对人做功的情况是 A.加速时做正功,匀速时不做功,减速时做负功 B.加速时做正功,匀速和减速时做负功 C.加速和匀速时做正功,减速时做负功 D.始终做正功 一质量为 m的木块静止在光滑的水平面上。从 t=0开始,将一个大小为 F的水平恒力作用 在该木块上,下列说法正确的是 A.木块在经历时间 t1的过程中,水平恒力 F做的功为 2 2 1 2 F t m B.木块在经历时间 t1,在 t1时刻力 F的瞬时功率为 2 2 1 2 F t m C.木块在经历时间 t1,在 t1时刻力 F的瞬时功率为 2 1F t m D.木块在经历时间 t1的过程中,水平恒力 F做功的平均功率为 2 2 1F t m 水平地面上有一木箱,木箱与地面之间的动摩擦因数为μ(0<μ<1)。现对木箱施加一拉力 F,使木箱做匀速直线运动。设 F的方向与水平面夹角为θ,如图,在θ从 0逐渐增大到 90°的过 程中,木箱的速度保持不变,则 A.F一直增大 B.F先减小后增大 C.F的功率减小 D.F的功率不 变 汽车在平直公路上以速度 v0匀速行驶,发动机功率为 P,牵引力为 F0。t1时刻,司机减小 了油门,使汽车的功率立即减小一半,并保持该功率继续行驶,到 t2时刻,汽车又恢复了匀速 直线运动(设整个过程中汽车所受的阻力不变)。则下图中能正确反映汽车牵引力 F、汽车速 度 v在这个过程中随时间 t变化的图象正确的是 A.①③ B.①④ C.②③ D.②④ 一质量为 800 kg 的电动汽车由静止开始沿平直公路行驶,达到的最大速度为 18 m/s,利用 传感器测得此过程中不同时刻电动汽车的牵引力 F与对应的速度 v,并描绘出 1F v 图象,图 中 AB、BC均为直线。若电动汽车行驶过程中所受的阻力恒定,由图象可知下列说法正确的是 A.电动汽车由静止开始一直做变加速直线运动 B.电动汽车的额定功率为 10.8 kW C.电动汽车由静止开始经过 2 s,速度达到 6 m/s D.电动汽车行驶中所受的阻力为 600 N 质量为 m的汽车在平直路面上启动,启动过程的速度图象如图所示,从 t1时刻起汽车的功 率保持不变,整个运动过程中汽车所受阻力恒为 Ff,则 A.0~t1时间内,汽车的牵引力等于 1 1 vm t B.t1~t2时间内,汽车的功率等于 1 1 1 ( )f vm F v t C.汽车运动的最大速度等于 1 1 1 ( 1) f mv v F t D.t1~t2时间内,汽车的平均速度小于 1 2 2 v v 汽车的额定功率为 90 kW,当汽车受到水平路面的阻力为 f时,汽车行驶的最大速度为。 则 A.如果汽车受到水平路面的阻力变为 2f,汽车行驶的最大速度为 v/2 B.如果汽车受到水平路面的阻力变为 f/2,汽车行驶的最大速度为 v/2 C.如果汽车的额定功率变为 45 kW,汽车受到的阻力变为 f/2,则汽车行驶的最大速度为 v/2 D.如果汽车做匀速直线运动,汽车发动机的输出功率一定是 90 kW 用一根绳子竖直向上拉物块,物块从静止开始运动,绳子拉力的功率按如图所示规律变化, 已知物块的质量为 m,重力加速度为 g,0~t0时间内物块做匀加速直线运动,t0时刻后功率保持 不变,t1时刻物块达到最大速度,则下列说法正确的是 A.物块始终做匀加速直线运动 B.0~t0时间内物块的加速度大小为 0 0 P mt C.t0时刻物块的速度大小为 0P mg D.0~t1时间内物块上升的高度为 2 0 0 0 1 2 3( ) 2 2 P t Pt mg m g 【参考答案】 D 整个过程中,电梯对人的支持力方向竖直向上,而人的位移方向竖直向上,所以支持 力恒做正功,D正确。 【名师点睛】功的正负的判断:(1)直接用上述公式 cosW Fs (其中公式中是力 F与位 移 s间的夹角)来判断,此公式常用来判断恒力做功的情况;(2)利用力和速度的方向夹角; (3)利用功能转化关系,看物体的能量是否增加。 AC 由牛顿第二定律可以得到,F=ma,所以 Fa m ,t1时刻的速度为 1 Fv at t m ,t1 内通过的位移为 2 2 1 1 1 2 2 Ftx at m ,做功为 W=Fx= 2 2 1 2 F t m ,故 A正确;所以 t1时刻 F的功率为 2 1 1 F tFP Fv F t m m ,故 B错误,C正确;平均功率为 2 1 2 F tWP t m ,故 D错误。 【名师点睛】在计算平均功率和瞬时功率时一定要注意公式的选择,P=W/t一般用来计算平均 功率的大小,而 P=Fv可以计算平均功率也可以是瞬时功率,取决于速度是平均速度还是瞬时 速度。 BC 对物体受力分析如图所示。因为物体匀速运动,水平和竖直方向均受力平衡:Fcos θ=μ (mg–Fsin θ), cos sin mgF ,令: 2 1sin 1 , 2 cos 1 ,即: 1tan , 则: 2 2sin cos cos sin sin 11 mg mgF ,θ从 0 逐渐增大到 90°的过 程中,在θ+β<90°前:sin(β+θ)逐渐变大,所以 F逐渐减小;在θ+β>90°后:sin(β+θ)逐渐 变小,所以 F 逐渐增大;所以结论是:F 先减小后增大,故 A 错误,B 正确。功率: cos cos cos sin 1 tan mg mgvP Fv v ,θ从 0逐渐增大到 90°的过程中,tan θ 一直在变大,所以功率 P一直在减小,故 D错误,C正确。 B 汽车以功率 P、速度 0v 匀速行驶时,牵引力与阻力平衡。当司机减小油门,汽车的功 率减为 2 P 的瞬间,速度 v不变,由 P Fv 可知,汽车的牵引力突然减小到原来的一半,即为 0 1 2 F F ,阻力 f没有变化,汽车的牵引力小于阻力,汽车开始做减速运动,速度 v减小,功 率保持为 2 P ,由 P Fv 可知,随 v减小,牵引力逐渐增大,汽车受到的合力变大,由牛顿第 二定律得知,汽车的加速度逐渐减小,汽车做加速度减小的减速运动,当汽车牵引力再次等于 阻力,汽车再次匀速运动,由 P Fv 得知,此时汽车的速度为原来的一半,由图象可知,①④ 正确,故选 B。 BD AB段牵引力不变,根据牛顿第二定律知,加速度不变,做匀加速直线运动,故 A错 误 ; 额 定 功 率 P=Fminvmax=600×18 W=10.8 kW , 故 B 正 确 ; 匀 加 速 运 动 的 加 速 度 2 23000 600 m/s 3 m/s 800 a ,到达 B点时的速度 10 800= m/s=3.6 m/s 3 000 Pv F ,所以匀加速 的时间 =1.2 svt a ,若电动汽车一直做匀加速运动 2 s,则由静止开始经过 2 s的速度 v=at=6 m/s,所以电动汽车由静止开始经过 2 s,速度小于 6 m/s,故 C 错误;当最大速度 vmax=18 m/s 时,牵引力为 Fmin=600 N,故恒定阻力 f=Fmin=600 N,故 D正确。 BC 由题图可知,0~t1阶段,汽车做匀加速直线运动, 1 1 va t ,根据牛顿第二定律得: F1–Ff=ma,联立得, 1 1 1 f vF m F t ,故 A错误;在 t1时刻汽车达到额定功率 P=F1v1=(m 1 1 v t +Ff) v1,t1~t2时间内,汽车保持额定功率不变,故 B正确;t2时刻,速度达到最大值 v2,此时刻 F2=Ff, P=F2v2, 1 2 1 2 1 1( ) f mvPv v F F t = ,故 C正确;由 v–t图线与横轴所围面积表示位移的大小可知, t1~t2时间内,汽车的平均速度大于 1 2 2 v v ,故 D错误。 A 当牵引力和阻力的大小相等时即 F f 时,汽车的速度到达最大值,所以 P Fv fv ,当 2f f 时,即 2F f 时速度最大,由 P F v 可知, 2 vv ,故 A正确; 当 2 ff 时,即 2 fF 时速度最大,由 P F v 可知, 2v v ,故 B错误;如果汽车的 额定功率变为 45 kW 2 PP ,汽车受到的阻力变为 2 f ,当 2 fF 时速度最大,最大为 v, 故 C错误;汽车做匀速运动,并不一定在额定功率下运动,故输出功率不一定等于 90 kW,故 D错误。 D 0~t0时间内物块做匀加速直线运动,t0时刻后功率保持不变,根据 P Fv 知,增大, F减小,物块做加速度减小的加速运动,当加速度减小到零,物块做匀速直线运动,故 A错误; 根 据 0P Fv Fat , F mg ma 得 , ( )P mg ma at , 可 知 图 线 的 斜 率 0 0 =Pk m g a a t ,可知 0 0 Pa mt ,故 B 错误;在时刻速度达到最大, F mg ,则速度 0Pv mg ,可知 0t 时刻物块的速度大小小于 0 P mg ,故 C错误;P t 图线围成的面积表示牵引力 做 功 的 大 小 , 根 据 动 能 定 理 得 , 20 0 0 1 0( ) 1 22 =P t P t t mgh mv , 解 得 2 0 0 0 1 2 3( ) 2 2 P t Ph t mg m g ,故 D正确。 2 月 21 日 动能和动能定理(一) 高考频度:★★★☆☆ 难易程度:★★★☆☆ (2015·浙江卷)我国科学家正在研制航母舰载机使用的电磁弹射器。舰载机总质量为 43 10 kg ,设起飞过程中发动机的推力恒为 51.0 10 N ;弹射器有效作用长度为 100 m,推力 恒定。要求舰载机在水平弹射结束时速度大小达到 80 m/s。弹射过程中舰载机所受总推力为弹 射器和发动机推力之和,假设所受阻力为总推力的 20%,则 A.弹射器的推力大小为 61.1 10 N B.弹射器对舰载机所做的功为 81.1 10 J C.弹射器对舰载机做功的平均功率为 78.8 10 W D.舰载机在弹射过程中的加速度大小为 32 m/s2 【参考答案】ABD 【试题解析】设发动机的推力为 1F ,弹射器的推力为 2F ,则阻力为 1 20.2( )f F F ,根据动 能定理可得 2 1 2 1 2 1( ) 0.2( ) 2 F F F F s mv , 5 1 1.0 10 NF ,故解得 6 2 1.1 10 NF ,A 正确;弹射器对舰载机所做的功为 2 8 2 1.1 10 JFW F s ,B正确;舰载机在弹射过程中的加 速度大小为 21 2 1 20.2( ) 32 m / sF F F Fa m ,根据公式 21 2 s at 可得运动时间为 2 2.5 sst a ,所以弹射器对舰载机做功的平均功率为 2 2 74.4 10 WF F W P t ,故 C错误, D正确。 【方法技巧】在运用动能定理解题时,一定要弄清楚过程中有哪些力做功,做什么功?特别需 要注意重力做功和路径无关,只和始末位置高度有关,摩擦力、阻力做功与路径有关。 【知识补给】 对动能定理的理解 1.表达式的理解 (1)公式 W=Ek2–Ek1中 W是合外力做功,不是某个力做功,W可能是正功,也可能是负功。 (2)Ek2、Ek1分别是末动能和初动能,Ek2可能大于 Ek1,也可能小于 Ek1。 2.普遍性:动能定理虽然可根据牛顿第二定律和匀变速直线运动的公式推出,但动能定理本身 既适用于恒力作用过程,也适用于变力作用过程;既适用于物体做直线运动的情况,也适用于 物体做曲线运动的情况。 3.研究对象及过程:动能定理的研究对象可以是单个物体也可以是相对静止的系统。动能定理 的研究过程既可以是运动过程中的某一阶段,也可以是运动全过程。 4.因果关系:合外力对物体做功是引起物体动能变化的原因。合外力做正功时,动能增大;合 外力做负功时,动能减小。 5.动能定理的实质:实质是功能关系的一种具体体现。合外力做功是改变物体动能的一种途径, 物体动能的改变可由合外力做的功来度量。 如图所示,长为 L的长木板水平放置,在木板的 A端放置一个质量为 m的小物块,现缓慢 地抬高 A端,使木板以左端为轴转动,当木板转到与水平面的夹角为α时小物块开始滑动,此 时停止转动木板,小物块滑到底端的速度为 v,则在整个过程中 A.木板对物块做功为 2 2 1 mv B.摩擦力对小物块做功为 sinmgL C.支持力对小物块做功为 0 D.滑动摩擦力对小物块做功为 sin 2 1 2 mgLmv 如图所示,质量相同的甲乙两个小物块,甲从竖直固定的 1 4 光滑圆弧轨道顶端由静止滑下, 轨道半径为 R,圆弧底端切线水平,乙从高为 R的光滑斜面顶端由静止滑下。下列判断正确的 是 A.两物块到达底端时速度相同 B.两物块到达底端时动能相同 C.两物块运动到底端的过程中重力做功的瞬时功率在增大 D.两物块到达底端时,甲物块重力做功的瞬时功率大于乙物块重力做功的瞬时功率 人用绳子通过光滑定滑轮拉静止在地面上的物体 A,A穿在光滑的竖直杆上,当人以速度 v 竖直向下匀速拉绳使质量为 m的物体 A上升高度 h后到达如图所示位置时,此时绳与竖直杆的 夹角为θ。已知重力加速度为 g,则 A.此时物体 A的速度为 cos v B.此时物体 A的速度为 cosv C.该过程中绳对物体 A做的功为 2 2 sin 2mvmgh D.该过程中绳对物体 A做的功为 2 2 cos2 mvmgh 水平面上质量为 m=10 kg的物体受到的水平拉力 F随位移 s变化的规律如图所示,物体匀 速运动一段时间后,拉力逐渐减小,当 s=7.5 m时拉力减为零,物体也恰好停下。取 g=10 m/s2, 下列结论正确的是 A.物体与水平面间的动摩擦因数为 0.12 B.合外力对物体所做的功约为–40 J C.物体匀速运动时的速度为 2 m/s D.物体运动的时间为 0.4 s 如图是某缓冲装置,劲度系数足够大的轻质弹簧与直杆相连,直杆可在固定的槽内移动, 与槽间的滑动摩擦力恒为 f,直杆质量不可忽略。一质量为 m的小车以速度 v0撞击弹簧,最终 以速度 v弹回。直杆足够长,且直杆与槽间的最大静摩擦力等于滑动摩擦力,不计小车与地面 的摩擦。则 A.小车被弹回时速度 v一定小于 v0 B.直杆在槽内移动的距离等于 2 2 0 1 1 1( ) 2 2 mv mv f C.直杆在槽内向右运动时,小车与直杆始终保持相对静止 D.弹簧的弹力可能大于直杆与槽间的最大静摩擦力 如图是某传送装置的示意图。其中 PQ为水平的传送带,传送带长度 L=6 m,与水平地面的高 度为 H=5 m。MN是光滑的曲面,曲面与传送带相切于 N点,现在有一滑块质量为 m=3 kg 从离 N点高为 h=5 m处静止释放,滑块与传送带间的摩擦系数为μ=0.3。重力加速度为 g=10 m/s2。 (1)滑块以多大的速度进入传送带? (2)若传送带顺时针转动,请求出滑块与传送带摩擦产生的热量 Q与传送带的速度 v的大小 关系,并作出 Q与 v的图象。 (3)若传送带逆时针转动,请求出滑块从 Q点抛出后距 Q点的水平的距离与传送带的速度的 关系。(认为滑块以水平速度离开传送带) 【参考答案】 AD 设在整个过程中,木板对小物块做功为 W,整个过程中重力做功为零,则根据动能 定理得:W= 1 2 mv2,故 A正确。在木板从水平位置开始转动到与水平面的夹角为α的过程中, 摩擦力不做功,小物块沿木板下滑过程中,摩擦力对小物块做功。由于摩擦力小于重力沿斜面 向下的分力,即 f<mgsin α,则摩擦力对小物块做功 Wf=–fL≠–mgLsin α,故 B错误。在木板从 水平位置开始转动到与水平面的夹角为α的过程中,支持力对小物块做功,设为 WN,根据动能 定理得:WN–mgLsin α=0,得 WN=mgLsin α,故 C错误。在小物块下滑的过程中,根据动能定 理得:mgLsin α+Wf= 1 2 mv2–0得,Wf= 1 2 mv2–mgLsin α,故 D正确。 B 根据动能定理得, 21 2 mgR mv ,知两物块达到底端的动能相等,速度大小相等,但 是速度的方向不同,故 A错误,B正确;两物块到达底端的速度大小相等,物块甲受的重力与 其速度方向垂直,瞬时功率为零,故物块甲的重力做功的功率先增大后减小,物块乙受的重力 与其速度方向不垂直,其瞬时功率大于零,故 CD错误。 AD 将物体 A的速度分解为沿绳子方向和垂直于绳子方向。拉绳子的速度等于物体 A沿 绳子方向的分速度,根据平行四边形定则得,实际速度 cosA vv ,故 A正确,B错误;在物 体 A 上升的过程中根据动能定理有: −mgh+W= 1 2 mvA2−0,即绳对物体 A 做的功为 W=mgh+ 1 2 m 2 2cos v ,故 D正确,C错误。 AB 匀速时应有: mgfF ,解得动摩擦因数 12.0 ,A正确;根据 FsW 可 知,F–s 图象与 s 轴所夹图形的面积即为 F 做的功,可求出 0~2.5 m 内力 F 做的功为: 1 1 30 JW Fs ,共有 5×6=30个小格,所以可求出每小格面积 1 JS ;0~7.5 m内 F–s图象 与 s轴所夹的总面积为 50 1 J 50 JS ,则力 F做的总功为 50 JFW ,所以合外力做的功 为: 50 JFW W mgs 总 总 0.12 10 10 7.5 J 40 J ,B正确;对全过程由动能定理 应有: 2 0 10 2 W mv 总 ,解得: 0 2 2 m/sv ,C错误;由 F–s图象可知,物体匀速运动时 时间为 1 1 0 2.5 s 0.88 s 2 2 st v ,所以物体运动的总时间不可能为 0.4 s,D错误。 BD 小车在向右运动的过程中,弹簧的形变量若始终小于 fx k 时,直杆和槽间无相对 运动,小车被弹回时速度 v一定等于 v0;若形变量等于 fx k 时,杆和槽间出现相对运动,克 服摩擦力做功,小车的动能减小,所以小车被弹回时速度 v一定小于 v0,A错误。整个过程应 用动能定理:fs=△Ek,直杆在槽内移动的距离 2 2 0 1 1 1( ) 2 2 s mv mv f ,B正确。直杆在槽内向 右运动时,开始小车速度比杆的大,所以不可能与直杆始终保持相对静止,C错误。当弹力等 于最大静摩擦力时直杆开始运动,此时小车的速度大于直杆的速度,弹簧进一步被压缩,弹簧 的弹力大于最大静摩擦力,D正确。 (1)10 m/s (2)Q=54+6v (3)①传送带速度 v0<8 m/s,水平位移 x=v2t=8 m ②若传送带速度 v0 2 34 m/s,水平距离 x=vmt=2 34 m ③传送带速度 08m/s 2 34 m/sv ,水平距离 0 0x v t v (1)滑块从高 h处静止释放,滑到传送带的过程,根据动能定理有 2 1 1 2 mgh mv 解得速度 1= 2 10 m/sv gh (2)滑块到达传送带时速度水平向左,而传送带速度水平向右,所以滑块做匀减速运动,加速 度 2= 3m/sa g 传送带长度为 6 mL ,当滑块滑到到传送带的最左端时,根据匀变速直线运动有 2 2 2 1 2v v aL 解得速度 2=8 m/sv 运动时间 2 1 2= s 3 v vt a 设传送带速度为,则传送带向右的位移为 2 3 vx 摩擦生热 ( )=54+6Q mg L x v 图象如答案图所示 (3)若传送带速度大于 1=10 m/sv ,滑块在传送带上加速,若一直加速可达到最大速度 2 2 m 1 2v v aL 解得 m 136 m/s=2 34 m/sv ①若传送带速度 v0 2 34 m/s,滑块将以 m 136 m/s=2 34 m/sv 从 Q端水平抛出,平抛 运动时间 2 1sHt g ,水平距离 m 2 34 mx v t ②若传送带速度 010 m/s 2 34 m/sv ,滑块将加速到传送带速度后匀速,最终以 0v 从 Q端 抛出,水平距离 0 0x v t v 若传送带速度小于 1=10 m/sv ,滑块在传送带上匀减速。若一直匀减速可减到最小速度 2=8 m/sv ③如传送带速度 v0<8 m/s,滑块将以 2=8 m/sv 从 Q端离开传送带且平抛。水平位移 2 =8 mx v t ④如传送带速度 08m/s 2 34 m/sv ,滑块匀减速到等于传送带速度最终以速度 0v 从 Q端 抛出,水平距离 0 0x v t v 综上 ①传送带速度 v0<8 m/s,水平位移 x=v2t=8 m ②若传送带速度 v0 2 34 m/s,水平距离 x=vmt=2 34 m ③传送带速度 08m/s 2 34 m/sv ,水平距离 0 0x v t v 2 月 22 日 动能和动能定理(二) 高考频度:★★★☆☆ 难易程度:★★★☆☆ (2016·浙江卷)如图所示为一滑草场。某条滑道由上下两段高均为 h,与水平面倾角分别为 45° 和 37°的滑道组成,滑草车与草地之间的动摩擦因数为 。质量为 m的载人滑草车从坡顶由静 止开始自由下滑,经过上、下两段滑道后,最后恰好静止于滑道的底端(不计滑草车在两段滑 道交接处的能量损失, sin 37 =0.6o , cos37 =0.8o )。则 A.动摩擦因数 6 7 B.载人滑草车最大速度为 2 7 gh C.载人滑草车克服摩擦力做功为 mgh D.载人滑草车在下段滑道上的加速度大小为 3 5 g 【参考答案】AB 【试题解析】由动能定理可知: 2 cos 45 cos37 0 sin 45 sin 37 h hmg h mg mg o o o o , 解得 6 7 ,A正确; 对前一段滑道,根据动能定理有 21cos 45 sin 45 2 hmgh mg mv o o , 解得: 2 7 ghv ,则 B正确;载人滑草车克服摩擦力做功为 2mgh,C错误;载人滑草车在下 段滑道上的加速度大小为 sin 37 cos37 3 35 mg mga g m o o ,D错误。 【名师点睛】本题以娱乐场中的滑草场为背景,考查了动能定理与牛顿第二定律的综合应用。 解本题的关键是分析物体运动的物理过程及受力情况,正确选择合适的物理规律列出方程解答。 质量 m=2 kg 的物块放在粗糙水平面上,在水平拉力的作用下由静止开始运动,物块动能 Ek与其发生位移 x之间的关系如图所示。已知物块与水平面间的动摩擦因数μ=0.2,g=10 m/s2, 则下列说法中正确的是 A.x=1 m时物块的速度大小为 2 m/s B.x=3 m时物块的加速度大小为 1.25 m/s2 C.在前 2 m的运动过程中物块所经历的时间为 2 s D.在前 4 m的运动过程中拉力对物块做的功为 25 J 如图甲所示,长为 4 m 的水平轨道 AB与半径为 R=0.6 m 的竖直半圆弧轨道 BC在 B处平 滑连接,有一质量为 1 kg 的滑块(大小不计)从 A处由静止开始受水平力 F作用而运动,F随 位移变化的关系如图乙所示(水平向右为正),滑块与 AB间的动摩擦因数为μ=0.25,与 BC间 的动摩擦因数未知,g取 10 m/s2。 (1)求滑块到达 B处时的速度大小; (2)求滑块在水平轨道 AB上运动前 2 m过程所用的时间; (3)若到达 B点时撤去力 F,滑块沿半圆弧轨道内侧上滑,并恰好能到达最高点 C,则滑块在 半圆弧轨道上克服摩擦力所做的功是多少? 如图甲所示,一物体以一定的速度 v0沿足够长斜面向上运动,此物体在斜面上的最大位移 与斜面倾角的关系如图乙所示。设各种条件下,物体运动过程中的动摩擦因数均不变,g=10 m/s2。试求: (1)物体与斜面之间的动摩擦因数及物体的初速度大小; (2)θ为多大时,x值最小并求出 x的最小值。 如图所示,四分之三周长圆管的半径 R=0.4 m,管口 B和圆心 O在同一水平面上,D是圆 管的最高点,其中半圆周 BE段存在摩擦,BC和 CE段动摩擦因数相同,ED段光滑;质量 m=0.5 kg、直径稍小于圆管内径的小球从距 B点正上方高 H=2.5 m的 A处自由下落,到达圆管最低点 C时的速率为 6 m/s,并继续运动直到圆管的最高点 D飞出,恰能再次进入圆管,假定小球再 次进入圆管时不计碰撞能量损失,取重力加速度 g=10 m/s2,求: (1)小球飞离 D点时的速度; (2)小球从 B点到 D点过程中克服摩擦所做的功; (3)小球再次进入圆管后,能否越过 C点?请分析说明理由。 如图甲所示,物块与质量为 m的小球通过不可伸长的轻质细绳跨过两个定滑轮连接。物块 置于左侧滑轮正下方的表面水平的压力传感器装置上,小球与右侧滑轮的距离为。开始时物块 和小球均静止,此时传感器装置的示数记为初始值。现给小球施加一始终垂直于段细绳的力, 将小球缓慢拉起至细绳与竖直方向成 60°角,如图乙所示,此时传感器装置的示数为初始值的 3 4 倍;再将小球由静止释放,当运动至最低位置时,传感器的示数为初始值的 1.2倍。不计 滑轮的大小和摩擦,重力加速度的大小为 g,求: (1)物块的质量; (2)从释放到运动至最低位置的过程中,小球克服空气阻力所做的功。 【参考答案】 BCD 根据图象知,x=1 m时,动能为 2 J,即 21 2J 2 mv ,解得 2m/sv ,故 A错误; 对 x=2 m 到 x=4 m 段运用动能定理,有 kFx mgx E ,解得 F=6.5 N,加速度为 2 26.5 0.2 2 10 m / s 1.25m / s 2 F mga m ,故 B 正确;对前 2 m 运用动能定理得 kF x mgx E ,解得 6 NF ,物体的加速度为 21m/sF mga m ,末速度为 k2 8m/s 2 m/s 2 Ev m ,根据 v a t 得 2 st ,故 C 正确;对全过程运用动能定理得 kW mgs E 拉 ,解得 25 JW 拉 ,故 D正确。 (1)2 10 m/s (2) 8 35 s (3)5 J (1)对滑块从 A到 B的过程,由动能定理得 F1x1-F3x3-μmgx= 1 2 mvB2 解得 vB=2 10 m/s (2)在前 2 m内,由牛顿第二定律得 F1–μmg=ma,且 x1= 1 2 at12 解得 t1= 8 35 s (3)当滑块恰好能到达最高点 C时,有 mg=m 2 Cv R 对滑块从 B到 C的过程,由动能定理得 W–mg×2R= 1 2 mvC2– 1 2 mvB2 代入数值得 W=–5 J 即克服摩擦力做的功为 5 J (1) 3 3 , 0 5 m/sv (2) π 3 , 1.08 mx (1)当θ为 90°时,由运动学知识可得: ghv 22 0 ① 当θ=0°时, �3 4 5 0 x m,可知物体运动中必受摩擦阻力。设动摩擦因数为μ,此时摩擦力大小 为 f=μmg② 加速度大小为 a1=μg③ 由运动学方程可得 2 0 1 02v a x ④ 联立以上方程解得 3 3 , 50 v m/s (2)对于任意角度,根据动能定理可得,物体对应的最大位移 x满足的关系式: cossin 2 1 2 0 mgxmgxmv ⑤ 对⑤式变形可得: )sin(1cossin)cos(sin2 2 2 0 hh g vx ⑥ 设 tan ,则当 x的最小值为 08.1 2 3 1 2 hhx m 对应的 π π π π 2 2 6 3 (1) 2 m/s (2)10 J (3)不能越过 C点,因为到达 C点时速度大于零 (1)小球飞离 D点后做平抛运动,在水平方向:R=vDt,竖直方向:R= 1 2 gt2 解得 vD= 2 m/s (2)小球从 A到 D过程中,由动能定理得:mg(H–R)–Wf1= 1 2 mvD2–0 解得:Wf1=10 J (3)小球从 C到 D过程中,由动能定理得:–2mgR–Wf2= 1 2 mvD2– 1 2 mvC2 解得:Wf2=4.5 J 小球从 A到 C过程中,由动能定理得:mg(H+R)–Wf3= 1 2 mvC2–0 解得:Wf3=5.5 J 小球再次从 D到 C的过程中,由动能定理得:2mgR–Wf4= 1 2 mvC′2– 1 2 mvD2 解得:Wf4=4.5 J– 1 2 mvC′2 Wf4查看更多