- 2021-05-22 发布 |
- 37.5 KB |
- 23页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
高中数学复习 极坐标与参数方程师版
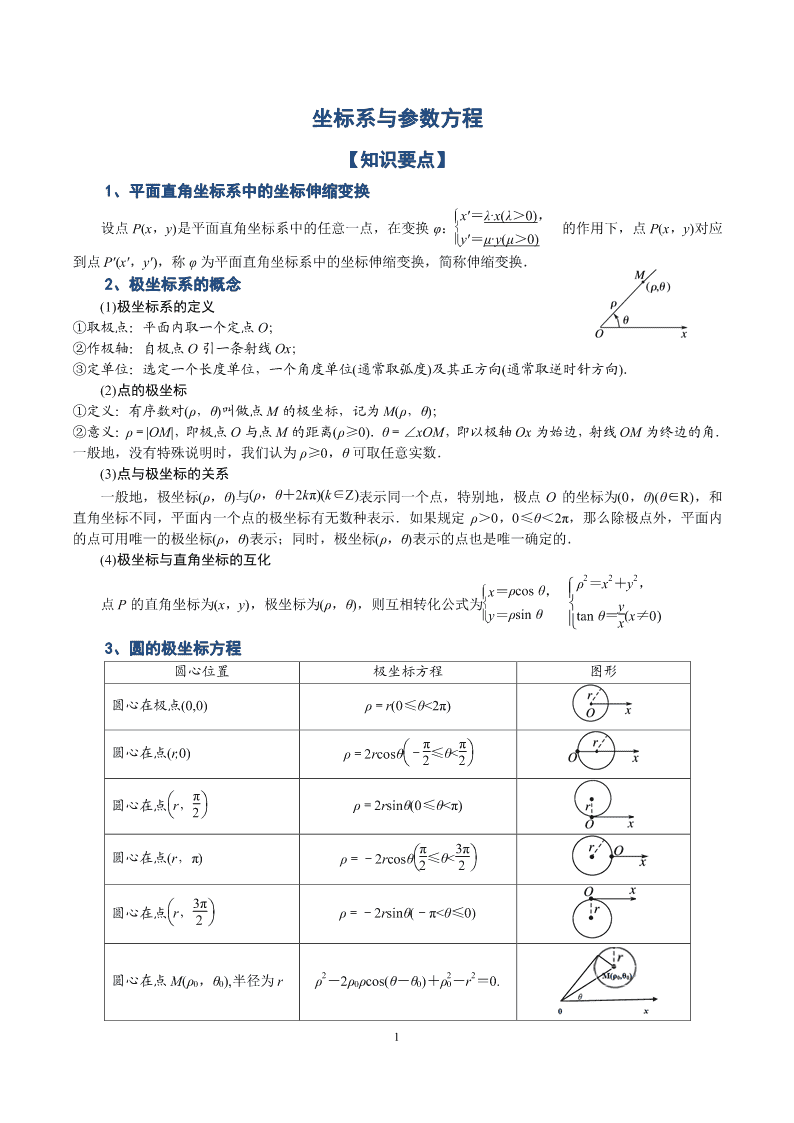
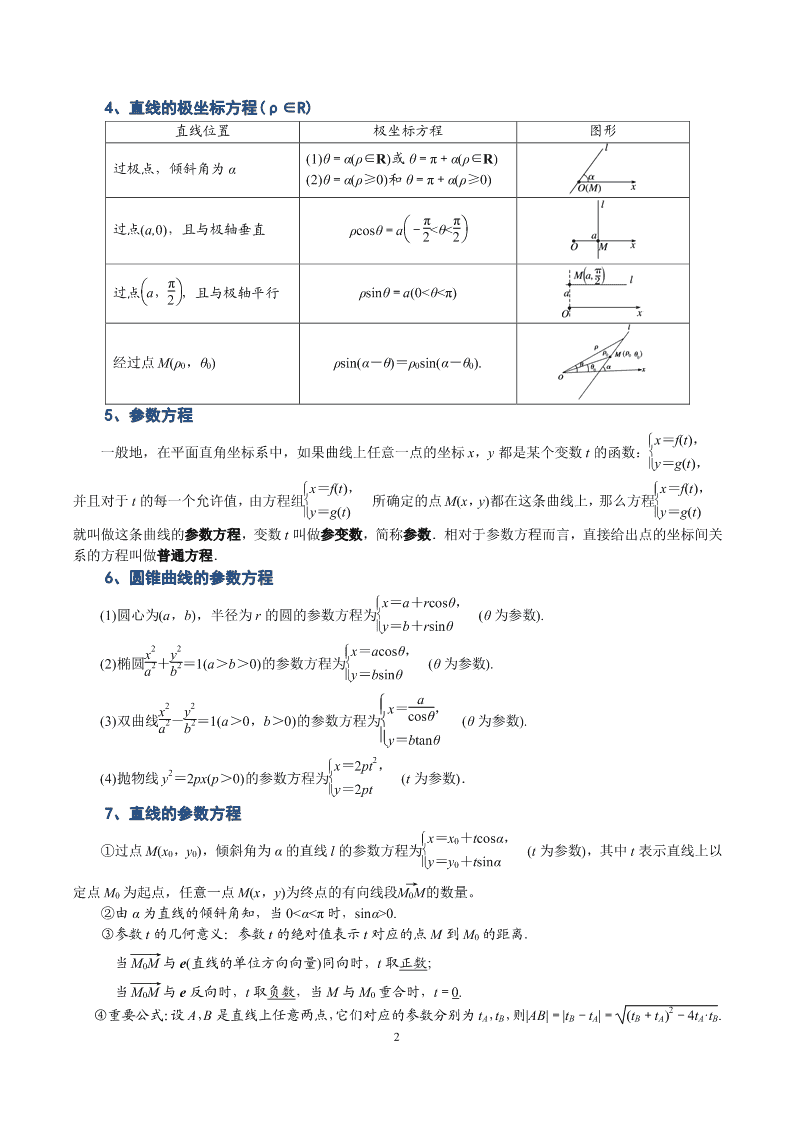
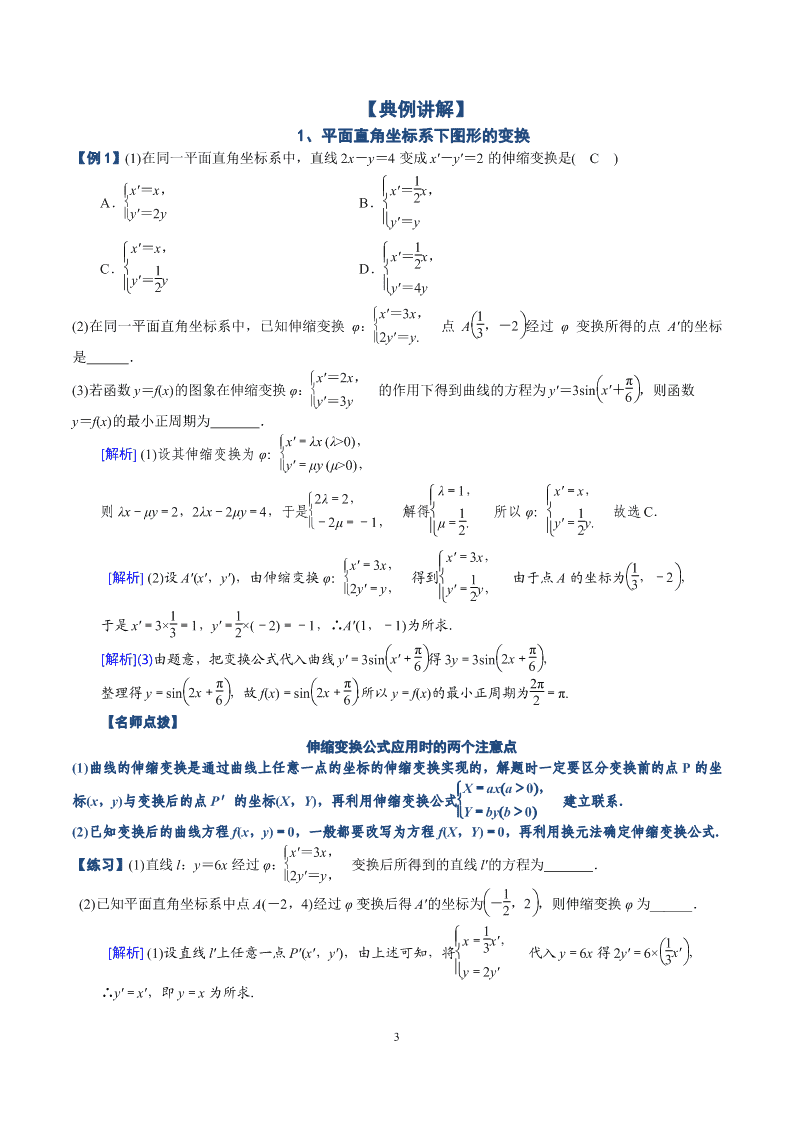
1 坐标系与参数方程 【知识要点】 1、平面直角坐标系中的坐标伸缩变换 设点 P(x,y)是平面直角坐标系中的任意一点,在变换 φ: x′=λ·x(λ>0), y′=μ·y(μ>0) 的作用下,点 P(x,y)对应 到点 P′(x′,y′),称 φ 为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2、极坐标系的概念 (1)极坐标系的定义 ①取极点:平面内取一个定点 O; ②作极轴:自极点 O 引一条射线 Ox; ③定单位:选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向). (2)点的极坐标 ①定义:有序数对(ρ,θ)叫做点 M 的极坐标,记为 M(ρ,θ); ②意义:ρ=|OM|,即极点 O 与点 M 的距离(ρ≥0).θ=∠xOM,即以极轴 Ox 为始边,射线 OM 为终边的角. 一般地,没有特殊说明时,我们认为 ρ≥0,θ 可取任意实数. (3)点与极坐标的关系 一般地,极坐标(ρ,θ)与ρ,θ+2kπk∈Z表示同一个点,特别地,极点 O 的坐标为(0,θ)(θ∈R),和 直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定 ρ>0,0≤θ<2π,那么除极点外,平面内 的点可用唯一的极坐标(ρ,θ)表示;同时,极坐标(ρ,θ)表示的点也是唯一确定的. (4)极坐标与直角坐标的互化 点 P 的直角坐标为(x,y),极坐标为(ρ,θ),则互相转化公式为 x=ρcos θ, y=ρsin θ ρ 2=x 2+y 2, tan θ= y x x≠0 3、圆的极坐标方程 圆心位置 极坐标方程 图形 圆心在极点(0,0) ρ=r(0≤θ<2π) 圆心在点(r,0) ρ=2rcosθ - π 2 ≤θ< π 2 圆心在点 r, π 2 ρ=2rsinθ(0≤θ<π) 圆心在点(r,π) ρ=-2rcosθ π 2 ≤θ< 3π 2 圆心在点 r, 3π 2 ρ=-2rsinθ(-π<θ≤0) 圆心在点 M(ρ0,θ0),半径为 r ρ 2-2ρ0ρcos(θ-θ0)+ρ 2 0-r 2=0. 2 4、直线的极坐标方程(ρ∈R) 直线位置 极坐标方程 图形 过极点,倾斜角为 α (1)θ=α(ρ∈R)或 θ=π+α(ρ∈R) (2)θ=α(ρ≥0)和 θ=π+α(ρ≥0) 过点(a,0),且与极轴垂直 ρcosθ=a - π 2 <θ< π 2 过点 a, π 2 ,且与极轴平行 ρsinθ=a(0<θ<π) 经过点 M(ρ0,θ0) ρsin(α-θ)=ρ0sin(α-θ0). 5、参数方程 一般地,在平面直角坐标系中,如果曲线上任意一点的坐标 x,y 都是某个变数 t 的函数: x=ft, y=gt, 并且对于 t 的每一个允许值,由方程组 x=ft, y=gt 所确定的点 M(x,y)都在这条曲线上,那么方程 x=ft, y=gt 就叫做这条曲线的参数方程,变数 t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关 系的方程叫做普通方程. 6、圆锥曲线的参数方程 (1)圆心为(a,b),半径为 r 的圆的参数方程为 x=a+rcosθ, y=b+rsinθ (θ 为参数). (2)椭圆 x 2 a 2+ y 2 b 2=1(a>b>0)的参数方程为 x=acosθ, y=bsinθ (θ 为参数). (3)双曲线 x 2 a 2- y 2 b 2=1(a>0,b>0)的参数方程为 x= a cosθ , y=btanθ (θ 为参数). (4)抛物线 y 2=2px(p>0)的参数方程为 x=2pt 2, y=2pt (t 为参数). 7、直线的参数方程 ①过点 M(x0,y0),倾斜角为 α 的直线 l 的参数方程为 x=x0+tcosα, y=y0+tsinα (t 为参数),其中 t 表示直线上以 定点 M0为起点,任意一点 M(x,y)为终点的有向线段M0M → 的数量。 ②由 α为直线的倾斜角知,当 0<α<π 时,sinα>0. ③参数 t 的几何意义:参数 t 的绝对值表示 t 对应的点 M 到 M0 的距离. 当 M0M ――→ 与 e(直线的单位方向向量)同向时,t 取正数; 当 M0M ――→ 与 e 反向时,t 取负数,当 M 与 M0重合时,t=0. ④重要公式:设 A,B 是直线上任意两点,它们对应的参数分别为 tA,tB,则|AB|=|tB-tA|= tB+tA 2-4tA·tB. 3 【典例讲解】 1、平面直角坐标系下图形的变换 【例 1】(1)在同一平面直角坐标系中,直线 2x-y=4 变成 x′-y′=2 的伸缩变换是( C ) A. x′=x, y′=2y B. x′= 1 2 x, y′=y C. x′=x, y′= 1 2 y D. x′= 1 2 x, y′=4y (2)在同一平面直角坐标系中,已知伸缩变换 φ: x′=3x, 2y′=y. 点 A 1 3 ,-2 经过 φ 变换所得的点 A′的坐标 是 . (3)若函数 y=f(x)的图象在伸缩变换 φ: x′=2x, y′=3y 的作用下得到曲线的方程为 y′=3sin x′+ π 6 ,则函数 y=f(x)的最小正周期为 . [解析] (1)设其伸缩变换为 φ: x′=λx (λ>0), y′=μy (μ>0), 则 λx-μy=2,2λx-2μy=4,于是 2λ=2, -2μ=-1, 解得 λ=1, μ= 1 2 . 所以 φ: x′=x, y′= 1 2 y. 故选 C. [解析] (2)设 A′(x′,y′),由伸缩变换 φ: x′=3x, 2y′=y, 得到 x′=3x, y′= 1 2 y, 由于点 A 的坐标为 1 3 ,-2 , 于是 x′=3× 1 3 =1,y′= 1 2 ×(-2)=-1,∴A′(1,-1)为所求. [解析](3)由题意,把变换公式代入曲线 y′=3sin x′+ π 6 得 3y=3sin 2x+ π 6 , 整理得 y=sin 2x+ π 6 ,故 f(x)=sin 2x+ π 6 .所以 y=f(x)的最小正周期为 2π 2 =π. 【名师点拨】 伸缩变换公式应用时的两个注意点 (1)曲线的伸缩变换是通过曲线上任意一点的坐标的伸缩变换实现的,解题时一定要区分变换前的点 P 的坐 标(x,y)与变换后的点 P′的坐标(X,Y),再利用伸缩变换公式 X=axa>0, Y=byb>0 建立联系. (2)已知变换后的曲线方程 f(x,y)=0,一般都要改写为方程 f(X,Y)=0,再利用换元法确定伸缩变换公式. 【练习】(1)直线 l:y=6x 经过 φ: x′=3x, 2y′=y, 变换后所得到的直线 l′的方程为 . (2)已知平面直角坐标系中点 A(-2,4)经过 φ变换后得 A′的坐标为 - 1 2 ,2 ,则伸缩变换 φ为______. [解析] (1)设直线 l′上任意一点 P′(x′,y′),由上述可知,将 x= 1 3 x′, y=2y′ 代入 y=6x 得 2y′=6× 1 3 x′ , ∴y′=x′,即 y=x 为所求. 4 解析:(2)设伸缩变换 φ: x′=λxλ>0, y′=μyμ>0, 则有 - 1 2 =-2λ, 2=4μ, 解得 λ= 1 4 , μ= 1 2 . ∴φ: x′= 1 4 x, y′= 1 2 y. 答案:φ: x′= 1 4 x, y′= 1 2 y 2、极坐标与直角坐标的互化 【例 2.1】将直角坐标方程与极坐标方程互化. (1)y 2=4x; (2)y 2+x 2-2x-1=0; (3)θ= π 3 (ρ∈R); (4)ρcos 2θ 2 =1; (5)ρ 2 cos2θ=4; (6)ρ= 1 2-cosθ . 【解析】 (1)将 x=ρcosθ,y=ρsinθ 代入 y 2=4x,得(ρsinθ) 2=4ρcosθ. 化简得 ρsin 2 θ=4cosθ. (2)将 x=ρcosθ,y=ρsinθ 代入 y 2+x 2-2x-1=0,得(ρsinθ) 2+(ρcosθ) 2-2ρcosθ-1=0, 化简得 ρ 2-2ρcosθ-1=0. (3)当 x≠0 时,由于 tanθ= y x ,故 tan π 3 = y x = 3, 化简得 y= 3x(x≠0); 当 x=0 时,y=0.显然(0,0)在 y= 3x 上,故 θ= π 3 (ρ∈R)的直角坐标方程为 y= 3x. (4)因为 ρcos 2θ 2 =1,所以 ρ· 1+cosθ 2 =1,而 ρ+ρcosθ=2,所以 x 2+y 2+x=2. 化简得 y 2=-4(x-1). (5)因为 ρ 2 cos2θ=4,所以 ρ 2 cos 2 θ-ρ 2 sin 2 θ=4,即 x 2-y 2=4. (6)因为 ρ= 1 2-cosθ ,所以 2ρ-ρcosθ=1,因此 2 x 2+y 2-x=1, 化简得 3x 2+4y 2-2x-1=0. 【例 2.2】圆心 C 的极坐标为(2, π 4 ),且圆 C 经过极点. (1)求圆 C 的极坐标方程; (2)求过圆心 C 和圆与极轴交点(不是极点)的直线的极坐标方程. 【解析】 (1)圆心 C 的直角坐标为( 2, 2),则设圆 C 的直角坐标方程为(x- 2) 2+(y- 2) 2=r 2, 依题意可知 r 2=(0- 2) 2+(0- 2) 2=4, 故圆 C 的直角坐标方程为(x- 2) 2+(y- 2) 2=4.即 x 2+y 2-2 2(x+y)=0, 化为极坐标方程为 ρ 2-2 2ρ(sinθ+cosθ)=0,即 ρ=2 2(sinθ+cosθ). (2)在圆 C 的直角坐标方程 x 2+y 2-2 2(x+y)=0 中, 令 y=0,得 x 2-2 2x=0,解得 x=0 或 2 2.于是得到圆 C 与 x 轴的交点坐标(0,0),(2 2,0), 由于直线过圆心 C( 2, 2)和点(2 2,0),则该直线的直角坐标方程为 y-0= 2-0 2-2 2 (x-2 2), 即 x+y-2 2=0.化为极坐标方程得 ρcosθ+ρsinθ-2 2=0. 【答案】 (1)ρ=2 2(sinθ+cosθ) (2)ρcosθ+ρsinθ-2 2=0 5 【练习】(2017·邯郸一中模拟)在直角坐标系 xOy 中,以 O 为极点,x 轴正半轴为极轴建立极坐标系.曲线 C 的极坐标方程为 ρcos θ- π 3 =1(0≤θ<2π),M,N 分别为 C 与 x 轴,y 轴的交点. (1)写出 C 的直角坐标方程,并求 M,N 的极坐标; (2)设 MN 的中点为 P,求直线 OP 的极坐标方程. 【解析】 (1)由 ρcos(θ- π 3 )=1,得 ρ( 1 2 cosθ+ 3 2 sinθ)=1. 从而 C 的直角坐标方程为 1 2 x+ 3 2 y=1,即 x+ 3y-2=0. 当 θ=0 时,ρ=2,所以 M(2,0); 当 θ= π 2 时,ρ= 2 3 3 ,所以 N( 2 3 3 , π 2 ). (2)M 点的直角坐标为(2,0).N 点的直角坐标为(0, 2 3 3 ). 所以 P 点的直角坐标为(1, 3 3 ).则 P 点的极坐标为( 2 3 3 , π 6 ), 所以直线 OP 的极坐标方程为 θ= π 6 (ρ∈R). 【答案】 (1)x+ 3y-2=0,M(2,0),N( 2 3 3 , π 2 ) (2)θ= π 6 (ρ∈R) 3、简单曲线的极坐标方程及应用 【例 3.1】(2019·银川模拟)已知曲线 C 的参数方程为 x=2+ 5cosα, y=1+ 5sinα (α 为参数),以直角坐标系的原点 O 为极点,x 轴正半轴为极轴建立极坐标系. (1)求曲线 C 的极坐标方程; (2)设 l1:θ= π 6 ,l2:θ= π 3 ,若 l1,l2 与曲线 C 相交于异于原点的两点 A,B,求△AOB 的面积. [解析] (1)∵曲线 C 的参数方程为 x=2+ 5cosα, y=1+ 5sinα (α 为参数), ∴曲线 C 的普通方程为(x-2) 2+(y-1) 2=5. 将 x=ρcosθ, y=ρsinθ 代入并化简得 ρ=4cosθ+2sinθ,∴曲线 C 的极坐标方程为 ρ=4cosθ+2sinθ. (2)在极坐标系中,曲线 C:ρ=4cosθ+2sinθ, ∴由 θ= π 6 , ρ=4cosθ+2sinθ, 得|OA|=2 3+1. 同理可得|OB|=2+ 3. 又∠AOB= π 6 , ∴S△AOB= 1 2 |OA|·|OB|sin∠AOB= 8+5 3 4 . ∴△AOB 的面积为 8+5 3 4 . 6 【例 3.2】(2019·济南市模拟)在平面直角坐标系 xOy 中,曲线 C 的参数方程为 x= 3cosα, y=1+ 3sinα (α 为参数), 以坐标原点 O 为极点,x 轴正半轴为极轴建立极坐标系,直线 l 的极坐标方程为 ρsin θ+ π 6 =2 3. (1)求曲线 C 的普通方程和直线 l 的直角坐标方程; (2)射线 OP 的极坐标方程为 θ= π 6 (ρ≥0),若射线 OP 与曲线 C 的交点为 A,与直线 l 的交点为 B,求线 段 AB 的长. 解 (1)由 x= 3cosα, y=1+ 3sinα, 可得 x= 3cosα, y-1= 3sinα, 所以 x 2+(y-1) 2=3cos 2 α+3sin 2 α=3, 所以曲线 C 的普通方程为 x 2+(y-1) 2=3。 由 ρsin θ+ π 6 =2 3,可得 ρ 3 2 sinθ+ 1 2 cosθ =2 3,所以 3 2 ρsinθ+ 1 2 ρcosθ-2 3=0, 所以直线 l 的直角坐标方程为 x+ 3y-4 3=0。 (2)解法一:曲线 C 的方程可化为 x 2+y 2-2y-2=0,所以曲线 C 的极坐标方程为 ρ 2-2ρsinθ-2=0。 由题意设 A ρ1, π 6 ,B ρ2, π 6 , 将 θ= π 6 代入 ρ 2-2ρsinθ-2=0,可得 ρ 2-ρ-2=0,所以 ρ=2 或 ρ=-1(舍去),即 ρ1=2, 将 θ= π 6 代入 ρsin θ+ π 6 =2 3,可得 ρ=4,即 ρ2=4,所以|AB|=|ρ1-ρ2|=2。 解法二:因为射线 OP 的极坐标方程为 θ= π 6 (ρ≥0),所以射线 OP 的直角坐标方程为 y= 3 3 x(x≥0), 由 x 2+y-1 2=3, y= 3 3 xx≥0, 解得 A( 3,1), 由 x+ 3y-4 3=0, y= 3 3 xx≥0, 解得 B(2 3,2), 所以|AB|= 2 3- 3 2+2-1 2=2。 【例 3.3】(2018·广东深圳一模)已知曲线 C1 的直角坐标方程为 x 2 4 +y 2=1,以坐标原点 O 为极点,x 轴的正 半轴为极轴建立极坐标系.P 是曲线 C1上一点,∠xOP=α(0≤α≤π),将点 P 绕点 O 逆时针旋转角 α 后得到 点 Q,OM → =2OQ → ,点 M 的轨迹是曲线 C2. (1)求曲线 C2的极坐标方程; (2)求|OM|的取值范围. 【解析】 (1)曲线 C1的极坐标方程为 ρ 2 cos 2 θ 4 +ρ 2 sin 2 θ=1,即 cos 2 θ 4 +sin 2 θ= 1 ρ 2. 在极坐标系中,设 M(ρ,θ),P(ρ1,α),则由题意知,ρ1= ρ 2 ,α= θ 2 .① 因为点 P 在曲线 C1 上,所以 cos 2 α 4 +sin 2 α= 1 ρ1 2.② 7 由①②得曲线 C2 的极坐标方程为 1 ρ 2= cos 2θ 2 16 + sin 2θ 2 4 . (2)由(1)得 1 |OM| 2= 1 ρ 2= 1 16 (1+3sin 2θ 2 ),因为 1 |OM| 2的取值范围是[ 1 16 , 1 4 ],所以|OM|的取值范围是[2,4]. 【答案】 (1) 1 ρ 2= cos 2θ 2 16 + sin 2θ 2 4 (2)[2,4] 【例 3.4】在直角坐标系 xOy 中,以 O 为极点,x 轴正半轴为极轴建立极坐标系.已知曲线 M 的参数方程为 x=1+cosφ, y=1+sinφ (φ 为参数),l1,l2 为过点 O 的两条直线,l1交 M 于 A,B 两点,l2交 M 于 C,D 两点,且 l1 的倾斜角为 α,∠AOC= π 6 . (1)求 l1 和 M 的极坐标方程; (2)当 α∈(0, π 6 ]时,求点 O 到 A,B,C,D 四点的距离之和的最大值. [解析] (1)依题意,直线 l1 的极坐标方程为 θ=α(ρ∈R). 由 x=1+cosφ, y=1+sinφ 消去 φ,得(x-1) 2+(y-1) 2=1. 将 x=ρcosθ,y=ρsinθ 代入上式,得 ρ 2-2ρcosθ-2ρsinθ+1=0. 故 M 的极坐标方程为 ρ 2-2ρcosθ-2ρsinθ+1=0. (2)依题意可设 A(ρ1,α),B(ρ2,α),C(ρ3,α+ π 6 ),D(ρ4,α+ π 6 ),且 ρ1,ρ2,ρ3,ρ4均为正数. 将 θ=α代入 ρ 2-2ρcosθ-2ρsinθ+1=0,得 ρ 2-2(cosα+sinα)ρ+1=0, 所以 ρ1+ρ2=2(cosα+sinα), 同理可得,ρ3+ρ4=2[cos(α+ π 6 )+sin(α+ π 6 )], 所以点 O 到 A,B,C,D 四点的距离之和为 ρ1+ρ2+ρ3+ρ4=2(cosα+sinα)+2[cos(α+ π 6 )+sin(α+ π 6 )] =(1+ 3)sinα+(3+ 3)cosα=2(1+ 3)sin(α+ π 3 ). 因为 α∈(0, π 6 ],所以当 sin(α+ π 3 )=1,即 α= π 6 时,ρ1+ρ2+ρ3+ρ4 取得最大值 2+2 3. 所以点 O 到 A,B,C,D 四点距离之和的最大值为 2+2 3. 【练习 1】 (2019·启东模拟)在直角坐标系 xOy 中,已知圆 C: x=2cosθ, y=2sinθ (θ 为参数),点 P 在直线 l:x+y-4=0 上,以坐标原点为极点,x 轴的正半轴为极轴,建立极坐标系. (1)求圆 C 和直线 l 的极坐标方程; (2)射线 OP 交圆 C 于点 R,点 Q 在射线 OP 上,且满足|OP| 2=|OR|·|OQ|,求点 Q 的轨迹的极坐标方程. [解析] (1)圆 C: x=2cosθ, y=2sinθ (θ 为参数)的直角坐标方程为 x 2+y 2=4, ∴圆 C 的极坐标方程为 ρ=2,直线 l 的极坐标方程 ρ= 4 sinθ+cosθ . (2)设点 P,Q,R 的极坐标分别为(ρ1,θ),(ρ,θ),(ρ2,θ), 8 ∵ρ1= 4 sinθ+cosθ ,ρ2=2, 又|OP| 2=|OR|·|OQ|,即 ρ 2 1=ρ·ρ2,∴ρ= ρ 2 1 ρ2 = 16 sinθ+cosθ 2× 1 2 , ∴ρ= 8 1+sin2θ .∴点 Q 的轨迹的极坐标方程为 ρ= 8 1+sin2θ . 【练习 2】(2019·成都市第二次诊断性检测)在平面直角坐标系 xOy 中,直线 l 的参数方程为 x=tcosα, y=tsinα (t 为参数,α为倾斜角),曲线 C 的参数方程为 x=4+2cosβ, y=2sinβ (β 为参数,β∈[0,π])。以坐标原点 O 为极 点,x 轴正半轴为极轴建立极坐标系。 (1)写出曲线 C 的普通方程和直线 l 的极坐标方程; (2)若直线 l 与曲线 C 恰有一个公共点 P,求点 P 的极坐标. 解 (1)由曲线 C 的参数方程 x=4+2cosβ, y=2sinβ, 得(x-4) 2+y 2=4。 因为 β∈[0,π],所以曲线 C 的普通方程为(x-4) 2+y 2=4(y≥0)。 因为直线 l 的参数方程为 x=tcosα, y=tsinα (t 为参数,α为倾斜角), 所以直线 l 的倾斜角为 α,且过原点 O(极点)。所以直线 l 的极坐标方程为 θ=α,ρ∈R。 (2)由(1)可知,曲线 C 为半圆弧。 若直线 l 与曲线 C 恰有一个公共点 P,则直线 l 与半圆弧相切。 设 P(ρ,θ)(ρ>0)。由题意,得 sinθ= 2 4 = 1 2 ,故 θ= π 6 。 而 ρ 2+2 2=4 2,所以 ρ=2 3。所以点 P 的极坐标为 2 3, π 6 。 【练习 3】(2019·安徽示范高中)在直角坐标系 xOy 中,已知直线 l1:x=0 和圆 C:(x-1) 2+(y-1- 2) 2=1, 以坐标原点 O 为极点,x 轴的正半轴为极轴建立极坐标系. (1)求直线 l1 和圆 C 的极坐标方程; (2)若直线 l2 的极坐标方程为 θ= π 4 (ρ∈R),设直线 l1,l2 与圆 C 的公共点分别为 A,B,求△OAB 的面积. [解] (1)∵x=ρcos θ,y=ρsin θ, ∴直线 l1 的极坐标方程为 ρcos θ=0,即 θ= π 2 (ρ∈R), 圆 C 的极坐标方程为 ρ 2-2ρcos θ-2(1+ 2)ρsin θ+3+2 2=0. (2)设 A π 2 ,ρ1 ,B π 4 ,ρ2 ,将 θ= π 2 代入(1)中圆 C 的极坐标方程, 得 ρ 2-2(1+ 2)ρ+3+2 2=0,解得 ρ1=1+ 2. 将 θ= π 4 代入(1)中圆 C 的极坐标方程,得 ρ 2-2(1+ 2)ρ+3+2 2=0,解得 ρ2=1+ 2. 故△OAB 的面积为 1 2 ×(1+ 2) 2×sin π 4 =1+ 3 2 4 . 9 增分方略 极坐标方程与普通方程的互化技巧 (1)巧用极坐标方程两边同乘以 ρ或同时平方技巧,将极坐标方程构造成含有 ρcos θ,ρsin θ,ρ 2 的形式, 然后利用公式代入化简得到普通方程. (2)巧借两角和差公式,转化 ρsin(θ±α)或 ρ=cos(θ±α)的结构形式,进而利用互化公式得到普通方程. (3)将直角坐标方程中的 x 转化为 ρcos θ,将 y 换成 ρsin θ,即可得到其极坐标方程. 4、参数方程与普通方程的互化 【例 4.1】将下列参数方程化为普通方程. (1) x= 3k 1+k 2, y= 6k 2 1+k 2 (k 为参数); (2) x=1-sin 2θ, y=sin θ+cos θ (θ 为参数). [解析] (1)两式相除,得 k= y 2x ,将其代入 x= 3k 1+k 2,得 x= 3· y 2x 1+ y 2x 2 , 化简得所求的普通方程是 4x 2+y 2-6y=0(y≠6). (2)由(sin θ+cos θ) 2=1+sin 2θ=2-(1-sin 2θ), 得 y 2=2-x.又 x=1-sin 2θ∈[0,2], 故所求的普通方程为 y 2=2-x,x∈[0,2]. 【例 4.2】(2019·宁夏模拟)在直角坐标系 xOy 中,曲线 C 的参数方程为 x= 5cosα-1 y= 5sinα+2 (α 为参数),以坐标 原点 O 为极点,x 轴正半轴为极轴建立极坐标系,直线 l 的极坐标方程为 ρcos(θ+ π 4 )= 3 2 2 . (1)求曲线 C 的普通方程与直线 l 的直角坐标方程; (2)设 M 为曲线 C 上的动点,求点 M 到直线 l 的距离的最大值. [解析] (1)曲线 C 的普通方程为(x+1) 2+(y-2) 2=5. 因为 ρcos(θ+ π 4 )= 3 2 2 .所以 2 2 ρ(cosθ-sinθ)= 3 2 2 , 所以直线 l 的直角坐标方程为 x-y-3=0. (2)设 M( 5cosα-1, 5sinα+2),则点 M 到直线 l 的距离 d= | 5cosα- 5sinα-6| 2 = | 10cosα+ π 4 -6| 2 . 所以 dmax=3 2+ 5. 【名师点拨】 将参数方程化为普通方程的方法 (1)将参数方程化为普通方程,需要根据参数方程的结构特征,选取适当的消参方法.常见的消参方法 有:代入消参法、加减消参法、平方消参法等,对于含三角函数的参数方程,常利用同角三角函数关系式 消参.如 sin 2θ+cos 2θ=1等. (2)将参数方程化为普通方程时,要注意两种方程的等价性,不要增解. 【练习 1】把下列参数方程化为普通方程. 10 (1) x= t, y=2 1-t (t 为参数); (2) x=sinθ, y=cos 2 θ (θ 为参数,θ∈[0,2π]). 【解析】 (1)x 2=t, y 2 4 =1-t=1-x 2,x 2+ y 2 4 =1,而 t≥0,0≤1-t≤1,得 0≤y≤2. (2)∵sin 2θ+cos 2θ=1,∴x 2+y=1,即 y=1-x 2 . 又∵|sinθ|≤1, ∴其普通方程为 y=1-x 2 (|x|≤1). 【答案】 (1)x 2+ y 2 4 =1(0≤x≤1,0≤y≤2) (2)y=1-x 2 (|x|≤1) 【练习 2】(2017·全国卷Ⅰ)在直角坐标系 xOy 中,曲线 C 的参数方程为 x=3cosθ, y=sinθ (θ 为参数),直线 l 的 参数方程为 x=a+4t, y=1-t (t 为参数). (1)若 a=-1,求 C 与 l 的交点坐标; (2)若 C 上的点到 l 距离的最大值为 17,求 a. [解析] (1)曲线 C 的普通方程为 x 2 9 +y 2=1. 当 a=-1 时,直线 l 的普通方程为 x+4y-3=0. 由 x+4y-3=0, x 2 9 +y 2=1, 解得 x=3, y=0 或 x=- 21 25 , y= 24 25 . 从而 C 与 l 的交点坐标为(3,0),(- 21 25 , 24 25 ). (2)直线 l 的普通方程为 x+4y-a-4=0,故 C 上的点(3cosθ,sinθ)到 l 的距离为 d= |3cosθ+4sinθ-a-4| 17 . 当 a≥-4 时,d 的最大值为 a+9 17 .由题设得 a+9 17 = 17,所以 a=8; 当 a<-4 时,d 的最大值为 -a+1 17 .由题设得 -a+1 17 = 17,所以 a=-16. 综上,a=8 或 a=-16. 【练习 3】 已知曲线 C: 4x 2 9 + y 2 16 =1,直线 l: x=3+t, y=5-2t (t 为参数)。 (1)写出曲线 C 的参数方程和直线 l 的普通方程; (2)设曲线 C 上任意一点 P 到直线 l 的距离为 d,求 d 的最大值与最小值。 解 (1)曲线 C 的参数方程为 x= 3 2 cosθ, y=4sinθ (θ 为参数),直线 l 的普通方程为 2x+y-11=0。 (2)可设点 P 3 2 cosθ,4sinθ ,则点 P 到直线 l 的距离 d= 5 5 |3cosθ+4sinθ-11|= 5 5 |5sin(θ+α)-11|,其 中 α 为锐角,且 tanα= 3 4 。 则当 sin(θ+α)=-1 时,d 取得最大值,最大值为 16 5 5 ; 当 sin(θ+α)=1 时,d 取得最小值,最小值为 6 5 5 。 11 5、参数方程的应用 【例 5.1】(2019·湖南五市十校联考)在直角坐标系 xOy 中,设倾斜角为 α 的直线 l 的参数方程为 x=3+tcos α, y=tsin α (t 为参数),直线 l 与曲线 C: x= 1 cos θ , y=tan θ (θ 为参数)相交于不同的两点 A,B. (1)若 α= π 3 ,求线段 AB 的中点的直角坐标; (2)若直线 l 的斜率为 2,且过已知点 P(3,0),求|PA|·|PB|的值. [解析] (1)由曲线 C: x= 1 cos θ , y=tan θ (θ 为参数),可得曲线 C 的普通方程是 x 2-y 2=1. 当 α= π 3 时,直线 l 的参数方程为 x=3+ 1 2 t, y= 3 2 t (t 为参数),代入曲线 C 的普通方程,得 t 2-6t-16=0, 设 A,B 对应的参数分别为 t1,t2,可得 t1+t2=6,所以线段 AB 的中点对应的 t= t1+t2 2 =3, 故线段 AB 的中点的直角坐标为 9 2 , 3 3 2 . (2)将直线 l 的参数方程代入曲线 C 的普通方程,化简得(cos 2 α-sin 2 α)t 2+6tcos α+8=0, 则|PA|·|PB|=|t1t2|= 8 cos 2 α-sin 2 α = 81+tan 2 α 1-tan 2 α ,由已知得 tan α=2,故|PA|·|PB|= 40 3 . 增分方略 1.直线的参数方程的应用 直线的标准参数方程主要用来解决过定点的直线与圆锥曲线相交时的弦长或距离问题.它可以避免求 交点时解方程组的繁琐运算,但应用直线的参数方程时,需先判断是否是标准形式再考虑参数的几何意义. 2.结论要记 根据直线的参数方程的标准式中 t 的几何意义,有如下常用结论: 过定点 M0的直线与圆锥曲线相交,交点为 M1,M2,所对应的参数分别为 t1,t2. (1)弦长 l=|t1-t2|; (2)弦 M1M2的中点⇒t1+t2=0; (3)|M0M1||M0M2|=|t1t2|. 12 【例 5.2】在平面直角坐标系 xOy 中,直线 l 的参数方程为 x=-2+ 3 5 t, y=2+ 4 5 t (t 为参数),它与曲线 C:(y-2) 2-x 2=1 交于 A,B 两点. (1)求|AB|的长; (2)在以 O 为极点,x 轴的正半轴为极轴建立极坐标系,设点 P 的极坐标为(2 2, 3π 4 ),求点 P 到线段 AB 中点 M 的距离. 【解析】 (1)将直线 l 的参数方程 x=-2+ 3 5 t, y=2+ 4 5 t (t 为参数),代入(y-2) 2-x 2=1,得 7 25 t 2+ 12 5 t-5=0. ∴t1+t2=- 60 7 ,t1t2=- 125 7 .∴|AB|=|t1-t2|= (t1+t2) 2-4t1t2= 10 7 71. (2)P 点直角坐标为(-2,2), 线段 AB 中点对应的参数值为 t1+t2 2 , ∴点 P 到线段 AB 中点 M 的距离为| t1+t2 2 |= 30 7 . 【答案】 (1) 10 71 7 (2) 30 7 ★状元笔记★ 直线的参数方程在交点问题中的应用 已知直线 l 经过点 M0(x0,y0),倾斜角为 α,点 M(x,y)为 l 上任意一点,则直线 l 的参数方程 x=x0+tcosα, y=y0+tsinα (t 为参数). (1)若 M1,M2是直线 l 上的两个点,对应的参数分别为 t1,t2, 则|M0M1 → ||M0M2 → |=|t1t2|,|M1M2 → |=|t2-t1|= (t2+t1) 2-4t1t2. (2)若线段 M1M2的中点为 M3,点 M1,M2,M3对应的参数分别为 t1,t2,t3,则 t3= t1+t2 2 . (3)若直线 l 上的线段 M1M2 的中点为 M0(x0,y0),则 t1+t2=0,t1t2<0. 【例 5.3】 (2019·福州市质量检测)在直角坐标系 xOy 中,直线 l 的参数方程为 x=- 1 2 t, y=a+ 3 2 t (t 为参数,α ∈R).以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,曲线 C 的极坐标方程为 ρ=4cosθ,射线 θ= π 3 (ρ≥0) 与曲线 C 交于 O,P 两点,直线 l 与曲线 C 交于 A,B 两点. (1)求直线 l 的普通方程和曲线 C 的直角坐标方程; (2)当|AB|=|OP|时,求 a 的值。 解 (1)将直线 l 的参数方程化为普通方程,得 3x+y-a=0。 由 ρ=4cosθ,得 ρ 2=4ρcosθ, 从而 x 2+y 2=4x,即曲线 C 的直角坐标方程为 x 2-4x+y 2=0。 13 (2)由 ρ=4cosθ, θ= π 3 ρ≥0, 得 P 2, π 3 。所以|OP|=2, 将直线 l 的参数方程代入圆的方程 x 2-4x+y 2=0 中,得 t 2+(2+ 3a)t+a 2=0, 由 Δ>0,得 2 3-4查看更多