- 2021-05-28 发布 |
- 37.5 KB |
- 16页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
中考物理必考实验 专题实验16探究杠杆平衡条件的实验
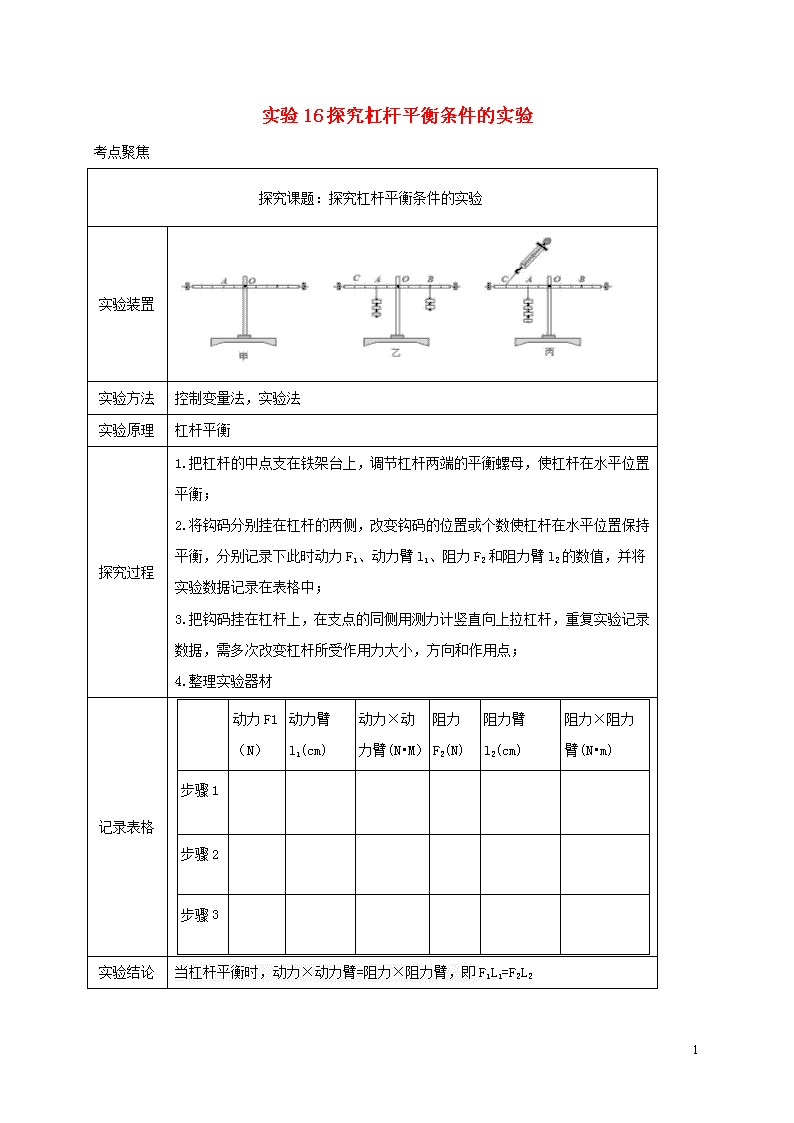
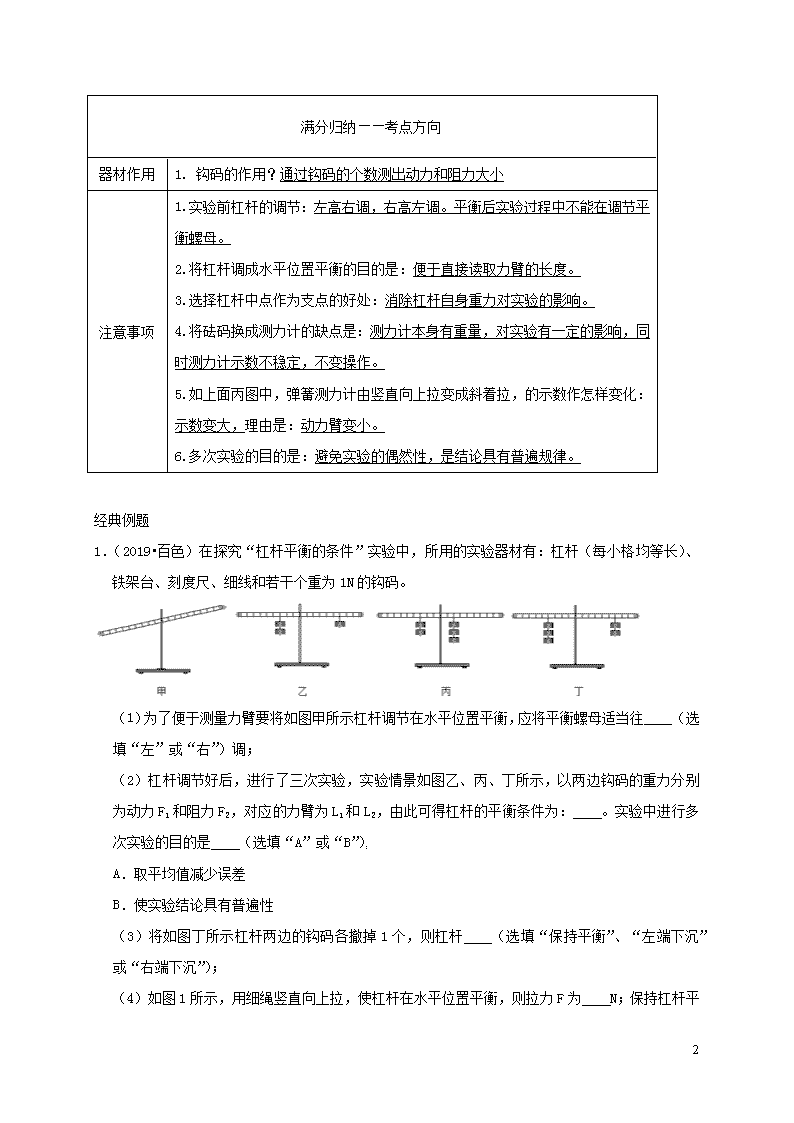
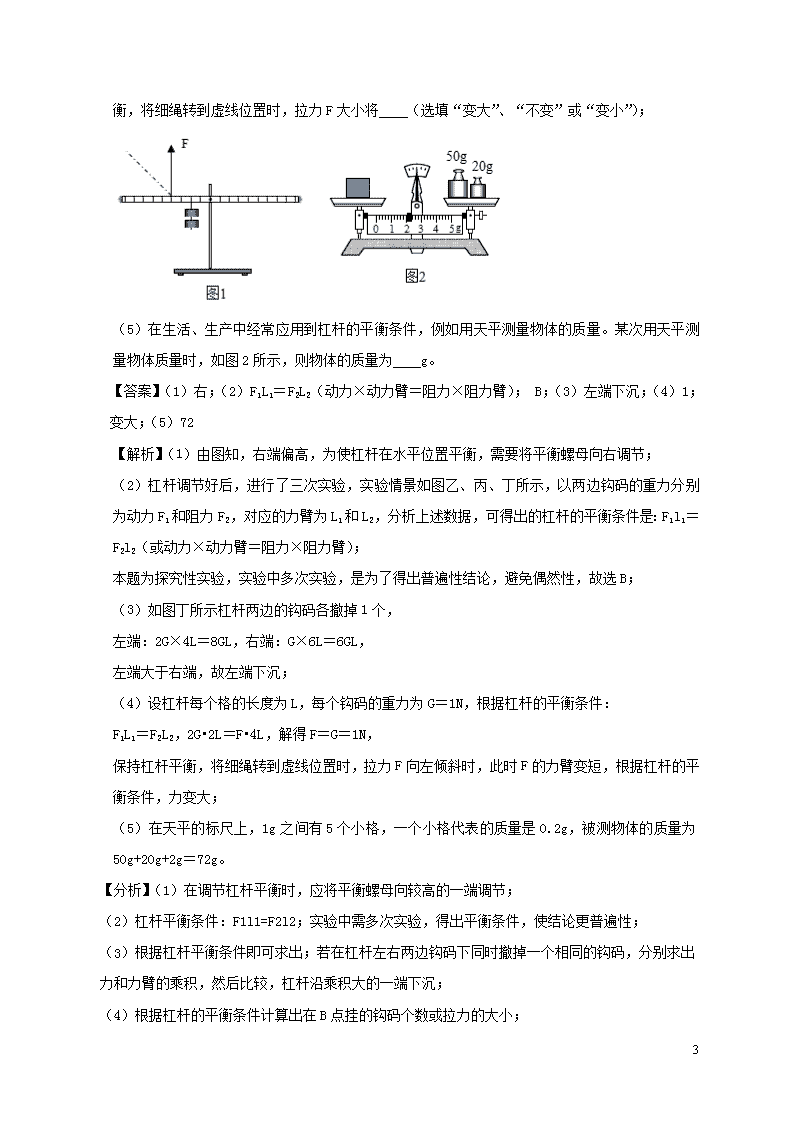
实验16探究杠杆平衡条件的实验 考点聚焦 探究课题:探究杠杆平衡条件的实验 实验装置 实验方法 控制变量法,实验法 实验原理 杠杆平衡 探究过程 1.把杠杆的中点支在铁架台上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡; 2.将钩码分别挂在杠杆的两侧,改变钩码的位置或个数使杠杆在水平位置保持平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l2的数值,并将实验数据记录在表格中; 3.把钩码挂在杠杆上,在支点的同侧用测力计竖直向上拉杠杆,重复实验记录数据,需多次改变杠杆所受作用力大小,方向和作用点; 4.整理实验器材 记录表格 动力F1(N) 动力臂l1(cm) 动力×动力臂(N•M) 阻力F2(N) 阻力臂l2(cm) 阻力×阻力臂(N•m) 步骤1 步骤2 步骤3 实验结论 当杠杆平衡时,动力×动力臂=阻力×阻力臂,即F1L1=F2L2 16 满分归纳——考点方向 器材作用 1. 钩码的作用?通过钩码的个数测出动力和阻力大小 注意事项 1.实验前杠杆的调节:左高右调,右高左调。平衡后实验过程中不能在调节平衡螺母。 2.将杠杆调成水平位置平衡的目的是:便于直接读取力臂的长度。 3.选择杠杆中点作为支点的好处:消除杠杆自身重力对实验的影响。 4.将砝码换成测力计的缺点是:测力计本身有重量,对实验有一定的影响,同时测力计示数不稳定,不变操作。 5.如上面丙图中,弹簧测力计由竖直向上拉变成斜着拉,的示数作怎样变化:示数变大,理由是:动力臂变小。 6.多次实验的目的是:避免实验的偶然性,是结论具有普遍规律。 经典例题 1.(2019•百色)在探究“杠杆平衡的条件”实验中,所用的实验器材有:杠杆(每小格均等长)、铁架台、刻度尺、细线和若干个重为1N的钩码。 (1)为了便于测量力臂要将如图甲所示杠杆调节在水平位置平衡,应将平衡螺母适当往 (选填“左”或“右”)调; (2)杠杆调节好后,进行了三次实验,实验情景如图乙、丙、丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的力臂为L1和L2,由此可得杠杆的平衡条件为: 。实验中进行多次实验的目的是 (选填“A”或“B”): A.取平均值减少误差 B.使实验结论具有普遍性 (3)将如图丁所示杠杆两边的钩码各撤掉1个,则杠杆 (选填“保持平衡”、“左端下沉”或“右端下沉”); (4)如图1所示,用细绳竖直向上拉,使杠杆在水平位置平衡,则拉力F为 N;保持杠杆平 16 衡,将细绳转到虚线位置时,拉力F大小将 (选填“变大”、“不变”或“变小”); (5)在生活、生产中经常应用到杠杆的平衡条件,例如用天平测量物体的质量。某次用天平测量物体质量时,如图2所示,则物体的质量为 g。 【答案】(1)右;(2)F1L1=F2L2(动力×动力臂=阻力×阻力臂); B;(3)左端下沉;(4)1;变大;(5)72 【解析】(1)由图知,右端偏高,为使杠杆在水平位置平衡,需要将平衡螺母向右调节; (2)杠杆调节好后,进行了三次实验,实验情景如图乙、丙、丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的力臂为L1和L2,分析上述数据,可得出的杠杆的平衡条件是:F1l1=F2l2(或动力×动力臂=阻力×阻力臂); 本题为探究性实验,实验中多次实验,是为了得出普遍性结论,避免偶然性,故选B; (3)如图丁所示杠杆两边的钩码各撤掉1个, 左端:2G×4L=8GL,右端:G×6L=6GL, 左端大于右端,故左端下沉; (4)设杠杆每个格的长度为L,每个钩码的重力为G=1N,根据杠杆的平衡条件: F1L1=F2L2,2G•2L=F•4L,解得F=G=1N, 保持杠杆平衡,将细绳转到虚线位置时,拉力F向左倾斜时,此时F的力臂变短,根据杠杆的平衡条件,力变大; (5)在天平的标尺上,1g之间有5个小格,一个小格代表的质量是0.2g,被测物体的质量为50g+20g+2g=72g。 【分析】(1)在调节杠杆平衡时,应将平衡螺母向较高的一端调节; (2)杠杆平衡条件:F1l1=F2l2;实验中需多次实验,得出平衡条件,使结论更普遍性; (3)根据杠杆平衡条件即可求出;若在杠杆左右两边钩码下同时撤掉一个相同的钩码,分别求出力和力臂的乘积,然后比较,杠杆沿乘积大的一端下沉; (4)根据杠杆的平衡条件计算出在B点挂的钩码个数或拉力的大小; 16 当拉力F向左倾斜时,分析出力臂的变化结合杠杆的平衡条件判断力的变化; (5)使用天平测量物体质量时,首先要明确标尺的分度值,被测物体的质量等于砝码的总质量与游码所对刻度之和。 突破练习 2.(2019•镇江)小飞用图1装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力F1和阻力F2,l1和l2分别表示动力臂和阻力臂。他的实验思路是改变F2、l1和l2,测得杠杆平衡时所需的拉力F1,来寻找F1、F2、l1和l2四个物理量之间的关系。已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为0~5N,杠杆上每一格长10cm。 实验次数 阻力F2/N 阻力臂l2/cm 动力臂l1/cm 动力F1/N 1 4 33 30 2 4 18 30 2.4 3 4 7.5 30 1.0 (1)为便于测量力臂,弹簧测力计应沿 方向拉杠杆,并使之在 位置平衡; (2)小飞首先保持F2和l1不变而改变l2,所获得的实验数据如表格所示,第1次实验中弹簧测力计示数的放大图如图2所示,则F1= N,此时杠杆的类型与 (选填“筷子”或“老虎钳”)相同; (3)为获得更多组数据,小飞继续进行(2)中实验,则为能顺利完成实验,在改变阻力臂l2时,l2应不超过 cm;完成上述实验后,小飞接下来还应进行的实验有①保持 不变而改变F2;②保持F2和l2不变而改变l1。 【答案】(1)竖直;水平;(2)4.4;筷子;(3)37.5;l1和l2 【解析】解:(1)力臂是支点到力的作用线的垂直距离。当弹簧测力计拉力方向与杠杆垂直时,拉力作用点到支点的距离就是其力臂,这样便于从杠杆上直接读出力臂,由图杠杆水平平衡时拉力方向应为竖直方向; (2)图中弹簧测力计的分度值是0.1N,指针指在4N下面第4个小格上,因此弹簧测力计读数为 16 4N+0.1N×4=4.4N; 筷子是费力杠杆,动力臂小于阻力臂,目的是省距离,应用了实验中的第1次实验原理。 (3)当F2=4N,动力臂l1=30cm,不变时,弹簧测力计的最大拉力为5N,根据杠杆平衡条件可得在改变阻力臂l2时,l2应不超过的数值: l2===37.5cm; 根据控制变量法可知,探究F1与F2的关系必须保持l1和l2不变。 3.(2019•阜新)在“探究杠杆平衡条件”的实验中: (1)如图甲,把质量分布均匀的杠杆中点O作为支点,其目的是消除 对实验的影响。为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的 。 (2)图乙中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动 格。当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 力。 (3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,弹簧测计示数 (选填“大于”、“小于”或“等于”)1N,如果竖直向上拉动弹簧测力计,它是 杠杆(选填“省力”、“费力”或“等臂”)(每个钩码重0.5N)。 (4)小明经过多次实验,分析实验数据后得出了杠杆平衡条件 。 【答案】(1)杠杆自重;运动状态;(2)1;平衡;(3)大于;省力;(4)F1l1=F2l2(或动力×动力臂=阻力×阻力臂) 【解析】(1)把质量分布均匀的杠杆中点置于支架上,杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响; 为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动, 16 说明力能改变物体的运动状态; (2)设一个钩码重为G,一格的长度为L; 根据杠杆的平衡条件可得:4G×2L=2G×nL, 解得:n=4, 故应该将B处所挂钩码须向右移动4﹣3=1格; 静止的钩码处于平衡状态,受到的重力和测力计对钩码的拉力是一对平衡力。 (3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,根据杠杆的平衡条件,弹簧测计示数: F==2G=2×0.5N=1N, 由于弹簧测力计拉力F的力臂小于4L,故F大于1N; 如果竖直向上拉动弹簧测力计,弹簧测力计力的力臂大于钩码的力臂,故它是省力杠杆; (4)杠杆的平衡条件为F1l1=F2l2(或动力×动力臂=阻力×阻力臂)。 4.(2019•荆州)小华在做“探究杠杆平衡条件”实验的装置如图,杠杆上相邻刻线间的距离相等。 (1)杠杆在如图甲的位置静止时 (选填“是”或“不是”)处于杠杆平衡状态的。 (2)为使杠杆在水平位置平衡,应将平衡螺母向 (选填“左”或“右”)端调节。 (3)如图乙,杠杆在水平位置平衡后,在A点挂两个钩码,每个钩码重0.5N,在B点竖直向下拉弹簧测力计,仍使杠杆水平位置平衡,此时弹簧测力计的示数应为 N.当弹簧测力计改为斜拉时,再次使杠杆水平位置平衡,则弹簧测力计的示数将 。(选填“变大”、“变小”或“不变”) (4)小华改变钩码的个数和位置进行了多次实验,其目的是 。 【答案】(1)是;(2)右;(3)1.5;变大;(4)使实验结论更具有普遍性,避免实验结论的偶然性 【解析】(1)杠杆的平衡状态是指杠杆处于静止或匀速转动状态,图甲中杠杆处于静止状态,因而杠杆处于平衡状态; 16 (2)图甲可知,杠杆不在水平位置,左端向下倾斜,说明杠杆的重心在左端,平衡螺母应向较高的右端调节; (3)每个钩码重0.5N,由图可知OB:OA=2:3, 根据杠杆的平衡条件可得,F×OB=2G×OA, 测力计的示数:F===1.5N; 斜向下拉时,阻力和阻力臂一定,动力臂变小,动力变大,所以,测力计的示数将大于1.5N; (4)本实验中进行多次测量的目的是:使实验结论更具有普遍性,避免实验结论的偶然性; 5.(2019•聊城)下面是小聪利用刻度均匀的匀质杠杆进行探究“杠杆平衡条件”的实验。 (1)实验前为方便测量力臂,应将杠杆调节到 位置平衡,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向 (选“左”或“右”)端调节。 (2)调节平衡后,在杠杆B点处挂6个钩码,如图甲所示,则在A点处应挂 个同样的钩码,杠杆仍然在水平位置平衡。 (3)图乙是小聪利用弹簧测力计做的某次实验情景,已知杠杆每格长5cm,钩码每个重0.5N,请将弹簧测力计的示数填入下表。 实验序号 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m 1 0.15 3.0 0.10 上述实验数据不符合杠杆平衡条件,出现问题的原因是 。 【答案】(1)水平;右;(2)4;(3)3.8;弹簧测力计没有竖直向下拉 【解析】(1)实验前为方便测量力臂,应将杠杆调节到水平位置平衡,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,右端偏高,这时应将平衡螺母向右端调节。 (2)如图甲所示,在杠杆B点处挂6个钩码,设在则在A点处应挂n个同样的钩码,杠杆仍然在水平位置平衡; 设每个钩码重为G,每个小格为L,根据杠杆的平衡条件F动l动=F阻l阻: 6G×2L=nG×3L,故n=4, 16 即在A点处应挂4个同样的钩码,杠杆仍然在水平位置平衡。 (3)弹簧测力计每一个大格代表1N,每一个小格代表0.2N,示数为3.8N。 弹簧测力计没有竖直向下拉,当弹簧测力计倾斜拉杠杆时,力臂小于动力点到支点的距离,动力臂变小。 6.(2019•苏州)利用杠杆开展相关实验探究: (1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,如图甲所示。则应将平衡螺母向 (选填“左”或“右”)调节,直到杠杄在水平位置平衡; (2)如图乙所示,在A点挂3个重力均为0.5N的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 N;若在第(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,弹簧测力计的示数会 (选填“偏大”、“偏小”或“不变”); (3)始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示。此过程中,弹簧测力计拉力的力臂 (选填“变大”、“变小”或“不变”,下同),拉力的大小 。 【答案】(1)左;(2)2.0;偏小;(3)变小;不变 【解析】利用杠杆开展相关实验探究: (1)安装好杠杆,将其放到水平位置后松手,发现杠杆沿顺时针方向转动,左端上翘,如图甲所示。则应将平衡螺母向左调节,直到杠杄在水平位置平衡; (2)由图可知,根据杠杆平衡条件得:FA×LA=FB×LB,3×0.5N×4L=FB×3L,所以FB=2.0N; 若在第(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,由于左侧已经存在杠杆的力与力臂的乘积,故弹簧测力计的示数会偏小; (3)图丙使杠杆由水平位置时,根据杠杆平衡条件F1L1=F2L2得, G×4L=F2×3L, 则F2=G; 16 当转动到图中位置时,设杠杆与水平位置的夹角为α,物体的力臂、弹簧测力计拉力的力臂均变小;则根据杠杆平衡条件F1L1=F2L2得, G×4L×cosα=F2′×3L×cosα, 则:F2′=G; 所以,在此过程中拉力F的大小不变。 7.(2019•德阳)如图是探究杠杆平衡条件的几个实验情景: (1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆 (选填“达到”或“没有达到”)平衡状态,接下来调节杠杆两端的螺母,使杠杆处于 。 (2)如图乙,A点挂有2个质量均为50g的钩码、为了让杠杆在水平位置平衡,应在B点挂 个质量均为50g的钩码。 (3)如图丙,现给你一个量程为0~2N的弹簧测力计,若干个50g的钩码,钩码挂在C点处,现使用弹簧测力计和钩码使杠杆在水平位置平衡,则在C点处所挂钩码的最多个数为 个。 【答案】(1)达到;水平位置平衡;(2)3;(3)6 【解析】(1)杠杆保持静止,此时杠杆处于静止状态,达到平衡; 由图中,杠杆的右端较高,平衡螺母应向右端移动使杠杆在水平位置平衡; (2)设杠杆的一个小格为L,一个钩码重为G, 因为,F1l1=F2l2, 所以,2G×3L=nG×2L, 所以,n=3,所以在B处挂3个钩码。 (3)为使拉力最小,动力臂要最长,拉力F的方向应该垂直杠杆向上,即竖直向上,动力臂为最长,F作用点在最左端, 根据杠杆的平衡条件,在C点处所挂钩码的最多个数: nG×4L=F×6L,nmg×4L=F×6L, 代入数据:n×0.05kg×10N/kg×4L=2N×6L, 解得,n=6。 16 8.(2020•衡阳模拟)小红和小明利用如图所示装置探究杠杆的平衡条件。 次数 F1/N L1/cm F2/N L2/cm 1 1 10 2 5 2 2 10 1 20 3 2 15 3 10 (1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。 (2)在实验过程中,调节杠杆在水平位置平衡的目的是 。 (3)在杠杆两端挂加钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂。多次实验并把数据记录在表格中。多次实验的目的是 。 (4)小明根据以上数据得出杠杆平衡条件是 。 (5)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆重新平衡,应在B点挂 个钩码。 (6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡。当弹簧测力计在原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”“变小”或“不变”)。 【答案】(1)右;(2)便于测量力臂的大小,同时消除杠杆自重的影响; (3)使结论具有普遍性(或寻找普遍的规律);(4)F1L1=F2L2(或动力×动力臂=阻力×阻力臂);(5)6;(6)变大 【解析】(1)图甲所示杠杆左端低右端高,要将杠杆调平需要将平衡螺母向右边调节; (2)在实验过程中,调节杠杆在水平位置平衡的目的是便于测量力臂的大小,同时消除杠杆自重的影响; (3)多次实验的目的是使实验结论具有普遍性; (4)由表中数据有: 1N×10cm=2N×5cm; 16 2N×10cm=1N×20cm; 2N×15cm=3N×10cm; 根据表格实验数据得出杠杆平衡条件是: F1L1=F2L2; (5)设一个钩码的重力为G,杠杆上一小格的长度为L,A点挂4个钩码,A点到O点的距离为3L,B点到O点的距离为2L,设B点需要n个钩码,根据杠杆平衡的平衡条件: 4G×3L=nG×2L,解得n=6,为使杠杆重新平衡,应在B点挂6个钩码; (6)弹簧测力计在原位置逐渐向右倾斜时,力臂变小,要使杠杆仍然在水平位置平衡,由杠杆的平衡条件,则拉力变大,即弹簧测力计的示数变大。 9.(2020•河南模拟)在“探究杠杆平衡条件”的实验中。 (1)让杠杆在水平位置平衡的目的是 。 (2)杠杆平衡后,小英同学在图甲所示的A位置挂上两个钩码,可在B位置挂上 个钩码,使杠杆在水平位置平衡。 (3)取下B位置的钩码,改用弹簧测力计拉杠杆的C点,当弹簧测力计由位置1转至位置 2的过程中,杠杆在水平位置始终保持平衡(如图乙),测力计示数如何变化: 。 (4)在探究过程中,我们需要测量和记录动力、动力臂、阻力、阻力臂四个物理量,在进行多次实验的过程中,我们 (选填“可以”“不可以”)同时改变多个量,进行探究测量。 (5)探究完杠杆平衡条件后,小英同学发现日常生活中有很多的杠杆: a.在农村老家她发现一种“舂米对”的古代简单机械,它的实质是一种杠杆,其示意图如图丙所示。使用这个装置时,人在A端用力把它踩下后立即松脚,B端就会立即下落,打在石臼内的谷物上,从而把谷物打碎。用力将它踩下去的过程中,动力是 (它的重力/脚踩的力),脚松开到打在石臼内的谷物时,它的重力是 16 (动力/阻力)。 b.回到家里,发现家里的两种墙壁开关也是杠杆如图丁,其按钮可绕面板内的轴转动。根据你的生活经验,你认为 (填“1”或“2”)较易损坏,这是因为按动这种开关的 较小,按动需要的力较大。 【答案】(1)方便测出力臂大小;(2)3;(3)先变小后变大;(4)可以;(5)a:脚踩的力;动力;b:1;力臂 【解析】(1)探究杠杆平衡条件时,使杠杆在水平位置平衡的目的是:力臂在杠杆上,方便测出力臂大小; (2)设杠杆的一个小格为L,一个钩码重为G, 因为,F1L1=F2L2, 所以,2G×3L=nG×2L, 所以,n=3,所以在A处挂3个钩码; (3)由图可知,OC为最长力臂,当弹簧测力计由位置1转至位置2的过程中,动力臂先变长后变短,而杠杆在水平位置始终保持平衡,根据杠杆平衡条件可知,测力计示数将先变小后变大。 (4)在“探究杠杆平衡条件”实验时本实验中,不断改变动力(臂)和阻力(臂),多次进行实验行多次测量的目的是:避免实验次数过少,导致实验结论具有偶然性,便于从中寻找规律; (5)a、①用力踩下这个装置的时候,脚踩的力使得杠杆转动,而装置自身的重力阻碍了杠杆的转动;因此,在这个过程中,动力是:脚踩的力;阻力是:杠杆自身的重力。 ②脚松开后,杠杆左边的力矩要大于右边的力矩,杠杆在自身的重力作用下转动,此时的动力是:杠杆自身的重力。 b、如图所示为家庭电路常用的两种墙壁开关,其按钮可绕面板内某轴转动,甲较易损坏,这是因为按动这种开关的力臂较小,按动需要的力较大。 10.(2020•广东模拟)在“探究杠杆平衡条件的实验”中。 (1)如图1甲所示,要使杠杆水平平衡,则应将平衡螺母向 (选填“左”或“右”)端调节,本实验中,调节杠杆在水平位置平衡主要目的是 。 16 (2)如图1乙所示,杠杆上的刻度均匀,在A点挂2个钩码,要使杠杆在水平位置平衡,应在C点挂 个相同的钩码或者在C点作用一个向 (选填“上”或“下”)的力。完成这次实验后,小明便得出了杠杆的平衡条件。同学们认为他这样实验归纳,得出结论不合理,理由是 。 (3)小明继续探究:保持A点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂L1和动力F1的数据,绘制了L1﹣F1的关系图象,如图丙所示。请根据图象推算,当L1为30cm时,F1为 N。 (4)小明发现本实验中,钩码对杠杆的拉力方向都是竖直的,他认为只采用竖直方向的力进行探究存在着不足,请你提出一条实验改进的建议: 。 (5)完成实验后,小明利用杠杆的平衡条件原理来计算杠杆的质量。 ①如图2所示,若以杠杆上的C位置为支点,在C的右侧挂质量为m的钩码,左右移动钩码的位置,使杠杆在水平位置平衡。 ②用刻度尺测出此时钩码悬挂位置D点到C点的距离L1和 点到C点的距离L2。 ③根据杠杆的平衡条件,可以计算出杠杆的质量m杆= (用题目中所给物理量符号表示)。 【答案】(1)左;消除杠杆自重的影响,同时便于测量力臂; (2)4;下;只根据一次实验数据得出的结论有偶然性; (3)0.5; (4)使用测力计沿非竖直的方向作用在杠杆上,使其在水平位置平衡,记下对应的拉力大小和力臂大小; (5)②杠杆中;③m 【解析】(1)如图1甲,杠杆不在水平位置,右端向下倾斜,说明杠杆的重心在右端,故应向左调节平衡螺母,使杠杆水平平衡; 调节杠杆在水平位置平衡主要目的是:消除杠杆自重的影响,同时便于测量力臂; (2)设一个钩码重为G,一格长为L,在C点挂钩码的个数为n, 根据杠杆平衡条件可知:2G×4L=nG×2L,解得n=4,需在C点挂4个钩码; 因重力的方向竖直向下,所以也可以在C点作用一个向下的力; 完成这次实验后,只根据一次实验数据小明便得出了杠杆的平衡条件,结论有偶然性; (3)由于保持A点钩码数量和力臂不变,即阻力和阻力臂大小不变,根据F1L1=F2L2,可知F2L2为一定值,由图丙知:F1L1=1N×0.15m=3N×0.05m=0.15N•m, 则当L1为30cm时, 16 拉力F1==0.5N; (4)小明认为只采用竖直方向的力进行探究存在着不足,则该实验改进的建议:可使用测力计沿非竖直的方向作用在杠杆上,使其在水平位置平衡,记下对应的拉力大小和力臂大小; (5)已知钩码的质量m,用刻度尺测出此时钩码悬挂位置D点到C点的距离L1和杠杆中点到C点的距离L2, 根据杠杆的平衡条件可得:mgL1=m杆gL2, 则杠杆的质量:m杆=m。 11.(2020•武汉模拟)如图所示,是“探究杠杆的平衡条件”的实验装置。 (1)实验前,杠杆如图甲静止,为使得杠杆在水平位置平衡,应将两端的平衡螺母向 调节; (2)杠杆平衡后,在左侧A点挂两个钩码,每个钩码重1N,在右端B竖直向下拉着弹簧测力计,使杠杆在水平位置平衡,如图所示,此时弹簧测力计的示数F= N; (3)若在B点斜向右下方拉弹簧测力计,仍保持杠杆水平平衡,则弹簧测力计的示数将 (变大/变小/不变);此时,要使杠杆在水平位置平衡且弹簧测力计的示数仍等于F,应将钩码向 (左/右)移动适当的距离。 【答案】(1)右;(2)3;(3)变大;右 【解析】(1)实验前,杠杆右端偏高,应将两端的平衡螺母向右调节,使杠杆在水平位置平衡; (2)由图可知:OB:OA=2:3, 根据杠杆的平衡条件可得,F×OB=G×OA, F===3N; (3)斜向下拉时,阻力和阻力臂一定,动力臂变小,动力变大,所以,测力计的示数将大于3N,要保持F大小不变,就得减小阻力臂,即应将钩码向右移动适当的距离。 12.(2020•淮滨县模拟)小明在“探究杠杆平衡条件”的实验中。 16 (1)实验前,将杠杆中点置于支架上,杠杆处于如图甲所示的静止状态,他应把杠杆左端的平衡螺母向 (选填“左”或“右”)侧调节,使杠杆在水平位置平衡。 (2)某同学用如图乙装置通过多次实验操作及数据分析出杠杆平衡的条件是:动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离,你认为他的结论 (选填“可靠”或“不可靠”),原因是 。 (3)如图乙所示,杠杆在水平位置平衡,若将A、B两点下方挂的钩码同时朝远离支点O方向移动一小格,则杠杆 (选填“仍保持平衡”、“左端下沉”或“右端下沉”)。 (4)取下A点下方所挂钩码,改用弹簧测力计在C点竖直 (选填“向上”或“向下”)拉杠杆,才能使杠杆在水平位置平衡,此时弹簧测力计的示数为F1,如果将弹簧测力计沿如图丙所示方向拉杠杆,使杠杆仍处于水平位置平衡,此时弹簧测力计的示数为F2,则F2 F1(选填“>”、“=”或“<”) 【答案】(1)右;(2)不可靠;杠杆一直处于水平位置进行实验比较特殊,不能得到普遍结论;(3)左端下沉;(4)向上;> 【解析】(1)调节杠杆在水平位置平衡,杠杆右端偏高,左端的平衡螺母应向上翘的右端移动,使杠杆在水平位置平衡; (2)杠杆在水平位置平衡,并且动力和阻力垂直作用在杠杆上,此时动力臂和阻力臂都在杠杆上,“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”成立;原因是杠杆一直处于水平位置进行实验比较特殊,不能得到普遍结论,当动力和阻力不垂直作用在杠杆上,动力臂和阻力臂小于支点和作用点之间的距离,“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”不成立; (3)若A、B两点的钩码同时向远离支点的方向移动一个格,则左侧3G×3L=9GL,右侧2G×4L=8GL,因为9GL>8GL 杠杆不能平衡,左端下沉; (4)取下A点下方所挂钩码,根据杠杆的平衡条件,改用弹簧测力计在C点向上拉,此时弹簧测力计的示数为F1,力与力臂的乘积相等,才能使杠杆在水平位置平衡; 将弹簧测力计沿如图丙所示方向拉杠杆,使杠杆仍处于水平位置平衡,阻力与阻力臂不变,动力 16 臂减小,此时弹簧测力计的示数为F2变大,则F2>F1。 16查看更多