- 2021-04-27 发布 |
- 37.5 KB |
- 28页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
【数学】2018届一轮复习人教B版 选考内容学案
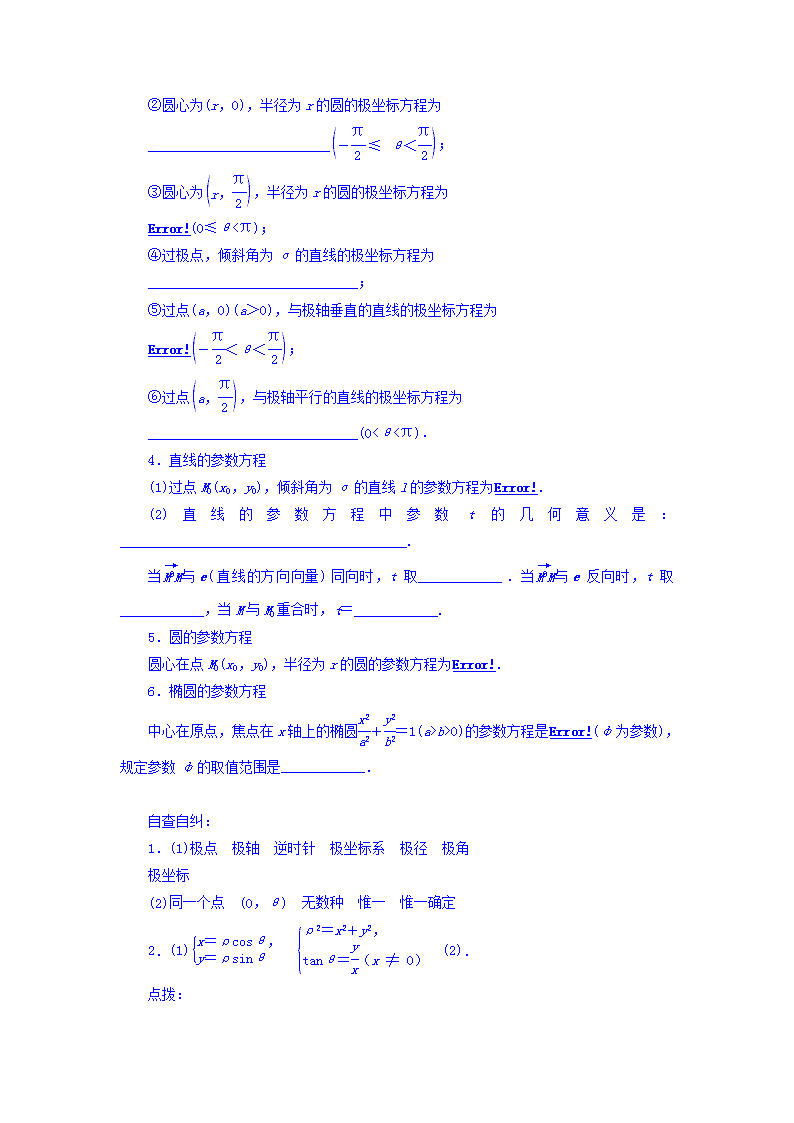
第十三章 选考内容 1.坐标系与参数方程 (1)了解坐标系的作用,了解在平面直角坐标系伸缩变换作用下平面图形的变化情况. (2)了解极坐标的基本概念,会在极坐标系中用极坐标刻画点的位置,能进行极坐标和直角坐标的互化. (3)能在极坐标系中给出简单图形表示的极坐标方程. (4)了解参数方程,了解参数的意义. (5)能选择适当的参数写出直线、圆和椭圆的参数方程. 2.不等式选讲 (1)理解绝对值的几何意义,并了解下列不等式成立的几何意义及取等号的条件: ①|a+b|≤|a|+|b|(a,b∈R); ②|a-b|≤|a-c|+|c-b|(a,b∈R). (2)会利用绝对值的几何意义求解以下类型的不等式: |ax+b|≤c; |ax+b|≥c; |x-c|+|x-b|≥a. (3)通过一些简单问题了解证明不等式的基本方法:比较法、综合法、分析法. 13.1 坐标系与参数方程 1.极坐标系 (1)在平面内取一个定点O,叫做________;自极点O引一条射线Ox,叫做________;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取________方向),这样就建立了一个________. 设M是平面内一点,极点O与点M的距离|OM|叫做点M的________ ,记为ρ;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的________,记为θ.有序数对(ρ,θ)叫做点M的________,记为M(ρ,θ). 一般地,不作特殊说明时,我们认为ρ≥0,θ可取任意实数. (2)一般地,极坐标(ρ,θ)与(ρ,θ+2kπ)(k∈Z)表示________.特别地,极点O的坐标为________(θ∈R).和直角坐标不同,平面内一个点的极坐标有________表示. 如果规定ρ>0,0≤θ<2π,那么除极点外,平面内的点可用________极坐标(ρ,θ)表示;同时,极坐标(ρ,θ)表示的点也是________的. 2.极坐标和直角坐标的互化 (1)把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位.设M是平面内任意一点,它的直角坐标是(x,y),极坐标是(ρ,θ).从图中可以得出它们之间的关系: __________________________. 由上式又得到下面的关系式: __________________________. 这就是极坐标与直角坐标的互化公式. (2)把直角坐标转化为极坐标时,通常有不同的表示法(极角相差2π的整数倍).一般只要取θ∈________就可以了. 3.简单曲线的极坐标方程 (1)曲线的极坐标方程的定义 一般地,在极坐标系中,如果平面曲线C上任意一点的极坐标中至少有一个满足方程f(ρ,θ)=0(因为平面内点的极坐标表示不惟一),并且坐标适合方程f(ρ,θ)=0的点都在曲线C上,那么方程____________叫做曲线C的极坐标方程. (2)常见曲线的极坐标方程 ①圆心在极点,半径为r的圆的极坐标方程为__________________________; ②圆心为(r,0),半径为r的圆的极坐标方程为 __________________________; ③圆心为,半径为r的圆的极坐标方程为 (0≤θ<π); ④过极点,倾斜角为α的直线的极坐标方程为 ______________________________; ⑤过点(a,0)(a>0),与极轴垂直的直线的极坐标方程为 ; ⑥过点,与极轴平行的直线的极坐标方程为 ______________________________(0<θ<π). 4.直线的参数方程 (1)过点M0(x0,y0),倾斜角为α的直线l的参数方程为. (2)直线的参数方程中参数t的几何意义是:_________________________________________. 当与e(直线的方向向量)同向时,t取____________.当与e反向时,t取____________,当M与M0重合时,t=____________. 5.圆的参数方程 圆心在点M0(x0,y0),半径为r的圆的参数方程为. 6.椭圆的参数方程 中心在原点,焦点在x轴上的椭圆+=1(a>b>0)的参数方程是(φ为参数),规定参数φ的取值范围是____________. 自查自纠: 1.(1)极点 极轴 逆时针 极坐标系 极径 极角 极坐标 (2)同一个点 (0,θ) 无数种 惟一 惟一确定 2.(1) (2). 点拨: 已知直线l经过点M0(x0,y0),倾斜角为α,点M(x,y)为l上任意一点,则直线l 的参数方程为(t为参数).(1)若M1,M2是直线l上的两个点,对应的参数分别为t1,t2,则||||=|t1t2|,||=|t2-t1|=.(2)若线段M1M2的中点为M3,点M1,M2,M3对应的参数分别为t1,t2,t3,则t3=.(3)若直线l上的线段M1M2的中点为M0(x0,y0),则t1+t2=0,t1t2<0. 在直角坐标系中,以原点为极点,x轴的正半轴为极轴建立极坐标系,已知曲线C:ρsin2θ=2acosθ(a>0),过点P(-2,-4)的直线l:(t为参数)与曲线C相交于M,N两点. (1)求曲线C的直角坐标方程和直线l的普通方程; (2)若|PM|,|MN|,|PN|成等比数列,求实数a的值. 解:(1)把代入ρsin2θ=2acosθ,得y2=2ax(a>0). 由(t为参数)消去t得x-y-2=0. 所以曲线C的直角坐标方程和直线l的普通方程分别是y2=2ax(a>0),x-y-2=0. (2)将(t为参数)代入y2=2ax(a>0), 整理得t2-2(4+a)t+8(4+a)=0. 设t1,t2是该方程的两根, 则t1+t2=2(4+a),t1t2=8(4+a), 因为|MN|2=|PM|·|PN|, 所以(t1-t2)2=(t1+t2)2-4t1t2=t1t2, 所以8(4+a)2-4×8(4+a)=8(4+a),所以a=1. ()在直角坐标系xOy中,曲线C1的参数方程为(α为参数).以坐标原点为极点,以x轴的正半轴为极轴,建立极坐标系,曲线C2的极坐标方程为ρsin=2. (1)写出C1的普通方程和C2的直角坐标方程; (2)设点P在C1上,点Q在C2上,求|PQ|的最小值及此时P的直角坐标. 解:(1)C1的普通方程为+y2=1,C2的直角坐标方程为x+y-4=0. (2)由题意,可设点P的直角坐标为(cosα,sinα).因为C2是直线,所以|PQ|的最小值即为P到C2的距离d(α)的最小值,d(α)==, 当且仅当α=2kπ+(k∈Z)时,d(α)取得最小值,最小值为,此时P的直角坐标为. 点拨: 圆与椭圆的参数方程的异同点:①圆与椭圆的参数方程,实质都是三角代换,有关圆或椭圆上的动点距离的最大值、最小值以及取值范围的问题,通常利用圆或椭圆的参数方程转化为三角函数的最大值、最小值求解.②圆的参数方程中的参数与椭圆的参数方程中的参数的几何意义不同,圆的参数方程中的参数是圆心角,椭圆的参数方程中的参数是离心角,只有椭圆上的点在坐标轴上时,离心角才等于圆心角. ()已知曲线C: +=1,直线l:(t为参数). (1)写出曲线C的参数方程,直线l的普通方程; (2)过曲线C上任一点P作与l夹角为30°的直线,交l于点A,求|PA|的最大值与最小值. 解:(1)曲线C的参数方程为(θ为参数). 直线l的普通方程为2x+y-6=0. (2)曲线C上任意一点P(2cosθ,3sinθ)到l的距离为 d=|4cosθ+3sinθ-6|. 则|PA|==|5sin(θ+α)-6|,其中α为锐角,且tanα=. 当sin(θ+α)=-1时,|PA|取得最大值,最大值为. 当sin(θ+α)=1时,|PA|取得最小值,最小值为. ()在直角坐标系xOy中,曲线C1:(t为参数,t≠0),其中0≤α<π.在以O为极点,x轴正半轴为极轴的极坐标系中,曲线C2:ρ=2sinα,C3:ρ= 2cosθ. (1)求C2与C3交点的直角坐标; (2)若C1与C2相交于点A,C1与C3相交于点B,求|AB|的最大值. 解:(1)曲线C2的直角坐标方程为x2+y2-2y=0,曲线C3的直角坐标方程为x2+y2-2x=0. 联立解得 或 所以C2与C3交点的直角坐标为(0,0)和. (2)曲线C1的极坐标方程为θ=α(ρ∈R,ρ≠0), 其中0≤α<π. 因此A的极坐标为(2sinα,α),B的极坐标为(2cosα,α). 所以|AB|=|2sinα-2cosα|=4. 当α=时,|AB|取得最大值,最大值为4. 点拨: 本题主要考查极坐标方程与参数方程的相关知识,具体涉及极坐标方程与直角坐标方程的互化、平面内直线与曲线的位置关系等内容,意在考查方程思想与数形结合思想,对运算求解能力有一定要求. 已知直线l的参数方程为(t为参数),以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,圆C的极坐标方程为ρ=4sin. (1)求圆C的直角坐标方程; (2)若P(x,y)是直线l与圆面ρ≤4sin的公共点,求x+y的取值范围. 解:(1)因为圆C的极坐标方程为ρ=4sin, 所以ρ2=4ρsin=4ρ. 又ρ2=x2+y2,x=ρcos θ,y=ρsin θ, 所以x2+y2=2 y-2x, 所以圆C的直角坐标方程为x2+y2+2x-2 y=0. (2)方法一:设z=x+y, 由圆C的方程x2+y2+2x-2 y=0⇒(x+1)2+(y-)2=4, 所以圆C的圆心是(-1,),半径是2, 将代入z=x+y得z=-t. 又直线l过C(-1,),圆C的半径是2,所以-2≤t≤2, 即x+y的取值范围是. 方法二:直线l的参数方程化成普通方程为x+y=2. 由 解得P1(-1-,+1),P2(-1+,-1). 因为P(x,y)是直线l与圆面ρ≤4sin的公共点, 所以点P在线段P1P2上, 所以x+y的最大值是×(-1+)+(-1)=2, 最小值是×(-1-)+(+1)=-2, 所以x+y的取值范围是. 类型六 利用参数方程求轨迹 ()在平面直角坐标系xOy中,以O为极点,x轴的正半轴为极轴建立极坐标系, 曲线C的极坐标方程为ρ=2cosθ,如图,曲线C与x轴交于O,B两点,P是曲线C在x轴上方图象上任意一点,连接OP并延长至M,使PM=PB,当P变化时,求动点M的轨迹的长度. 解:设M(ρ′,θ),θ∈,则OP=2cosθ,PB=2sinθ. 所以ρ′=OP+PM=OP+PB=2cosθ+2sinθ, 所以ρ′2=2ρ′cosθ+2ρ′sinθ, 化为普通方程:x2+y2=2x+2y, 所以M的轨迹方程为(x-1)2+(y-1)2=2(x>0,y>0). 可知M的轨迹为一个半圆弧, 所以点M的轨迹长度为π. 点拨: 用参数法求轨迹方程,其基本思想是选取适当的参数作为中间变量,使动点的坐标分别与参数有关,然后再消去参数,化为普通方程.很多与直线、圆、圆锥曲线有关的求轨迹的题目中,参数法更简捷. 已知圆C:x2+y2=4,直线l:x+ y=2.以O为极点,x轴的正半轴为极轴,取相同的单位长度建立极坐标系. (1)将圆C和直线l的方程化为极坐标方程; (2)P是l上的点,射线OP交圆C于点R,又点Q在OP上且满足|OQ|·|OP|=|OR|2,当点P在l上移动时,求点Q轨迹的极坐标方程,并指出它是什么曲线. 解:(1)将x=ρcosθ,y=ρsinθ代入圆C和直线l的直角坐标方程得其极坐标方程为C:ρ=2,l:ρ(cosθ+sinθ)=2. (2)设P,Q,R的极坐标分别为(ρ1,θ),(ρ,θ),(ρ2,θ), 则由|OQ|·|OP|=|OR|2得ρρ1=ρ. 又ρ2=2,ρ1=, 所以=4, 故点Q轨迹的极坐标方程为ρ=2(cosθ+sinθ)(ρ≠0). 点Q轨迹的普通方程为(x-1)2+(y-1)2=2,去掉(0,0)点. 故点Q的轨迹是圆心为(1,1),半径为的圆,去掉(0,0)点. 1.极坐标系 (1)极坐标系内两点间的距离公式 设极坐标系内两点P1(ρ1,θ1),P2(ρ2,θ2),则=. 特例:当θ1=θ2时,=. (2)极坐标方程与直角坐标方程的互化 ①直角坐标方程化为极坐标方程,只须将公式x=ρcosθ及y=ρsinθ直接代入直角坐标方程并化简即可;而极坐标方程化为直角坐标方程,则往往要通过变形,构造出形如ρcosθ,ρsinθ,ρ2的形式,再应用公式进行代换.其中方程的两边同乘以(或同除以)ρ及方程两边平方是常用的变形技巧. ②通常情况下,由tanθ确定角θ时,应根据点P所在象限取最小正角.在这里要注意:当x≠0时,θ角才能由tanθ=按上述方法确定.当x=0时,tanθ没有意义,这时又分三种情况:当x=0,y=0时,θ可取任何值;当x=0,y>0时,可取θ=;当x=0,y<0时,可取θ=. 2.求简单曲线的极坐标方程的方法 (1)设点M(ρ,θ)为曲线上任意一点,由已知条件,构造出三角形,利用正弦定理求解与θ的关系; (2)先求出曲线的直角坐标方程,再利用极坐标与直角坐标的变换公式,把直角坐标方程化为极坐标方程. 3.参数方程与普通方程的互化 (1)参数方程化为普通方程——消去参数. 消去参数的常用方法有: ①先由一个方程求出参数的表达式(用直角坐标变量表示),再代入另一个方程,即代入法; ②利用三角函数中的恒等式消去参数,运用最多的是sin2α+cos2α=1,即三角公式法; ③整体观察,对两式进行四则运算(运用较多的是两式整体相除),或先分离参数再运算. 总的来说,消参无定法,只要能消参,方法可灵活多样,多法齐用. (2)普通方程化为参数方程——选参数. 一般来说,选择参数时应考虑以下两点: ①曲线上每一点的坐标(x,y)都能由参数取某一值唯一地确定出来; ②参数与x,y的相互关系比较明显,容易列出方程. 参数的选取应根据具体条件来考虑.可以是时间,也可以是线段的长度、方位角、旋转角,动直线的斜率、倾斜角、截距,动点的坐标等. 在二者互化的过程中,要注意等价性,注意其中曲线上的点的横、纵坐标的取值范围是否因为转化而发生改变,如果发生改变则它们所表示的曲线就不是同一曲线. 1.若直线l的参数方程是(t∈R),则l的方向向量d可能是( ) A.(1,2) B.(2,1) C.(-2,1) D.(1,-2) 解:易求出直线方程为x+2y-5=0,方向向量(a,b)满足=-,检验知(-2,1)满足.故选C. 2.参数方程(θ为参数)表示的曲线上的点到坐标轴的最短距离为( ) A.1 B.2 C.3 D.4 解:参数方程(θ为参数)表示的曲线的普通方程为(x+3)2+(y-4)2=4,这是圆心为(-3,4),半径为2的圆,故圆上的点到坐标轴的最短距离为1.故选A. 3.在极坐标系中,直线ρ(cosθ-sinθ)=2与圆ρ=4sinθ的交点的极坐标为( ) A. B. C. D. 解:ρ(cosθ-sinθ)=2可化为直角坐标方程x-y=2,即y=x-2.ρ=4sinθ可化为 x2+y2=4y,把y=x-2代入x2+y2=4y,得 4x2-8x+12=0,即x2-2x+3=0,所以 x=,y=1.所以直线与圆的交点坐标为(,1),化为极坐标为.故选A. 4.()以平面直角坐标系的原点为极点,x轴的正半轴为极轴,建立极坐标系 ,两种坐标系中取相同的长度单位.已知直线l的参数方程是(t为参数),圆C的极坐标方程是ρ=4cosθ,则直线l被圆C截得的弦长为( ) A. B.2 C. D.2 解:圆ρ=4cosθ在直角坐标系下的方程为(x-2)2+y2=4,直线的普通方程为x-y-4=0,圆心到直线的距离是=,弦长为2=2.故选D. 5.()若直线l:(t为参数)与曲线C:(θ为参数)相切,则实数m为( ) A.-4或6 B.-6或4 C.-1或9 D.-9或1 解:由(t为参数),得直线l:2x+y-1=0,由(θ为参数),得曲线C:x2+(y-m)2=5,因为直线与曲线相切,所以圆心到直线的距离等于半径,即=,解得m=-4或m=6.故选A. 6.()在直角坐标系xOy中,以O为极点,x轴的正半轴为极轴建立极坐标系. 已知直线l的极坐标方程为ρ(sinθ-3cosθ)=0,曲线C的参数方程为( t为参数),l与C相交于A,B两点,则|AB|=( ) A.2 B.2 C.4 D.2 解:因为ρ(sinθ-3cosθ)=0,所以ρsinθ=3ρcosθ,所以y=3x,由消去t得y2-x2=4,联立得方程组解得或 不妨令A,B,由两点间的距离公式得|AB|==2.故选B. 7.在极坐标系中,点到直线ρ(cosθ+sinθ)=6的距离为__________. 解:点P化为P(1,),直线 ρ(cosθ+sinθ)=6化为x+y-6=0.所以点P到直线的距离d==1.故填1. 8.()若点P(x,y)在曲线 (θ为参数,θ∈R)上,则的取值范围是________. 解:由 消去参数θ得x2+(y-2)2=1,① 设=k,则y=kx,代入①式并化简,得(1+k2)x2-4kx+3=0,此方程有实数根,所以Δ=16k2-12(1+k2)≥0,解得k≤-或k≥.故填(-∞,-]∪[,+∞). 9.()在直角坐标系xOy中,圆C的参数方程为(φ为参数).以坐标原点为极点,x轴的正半轴为极轴建立极坐标系. (1)求圆C的极坐标方程; (2)直线l的极坐标方程是2ρsin=3,射线OM:θ=与圆C的交点为O,P,与直线l的交点为Q,求线段PQ的长. 解:(1)圆C的普通方程为(x-1)2+y2=1, 又x=ρcosθ,y=ρsinθ, 所以圆C的极坐标方程为ρ=2cosθ. (2)设P(ρ1,θ1),则由 得ρ1=1,θ1=,设Q(ρ2,θ2),则由 得ρ2=3,θ2=, 所以PQ=2. 10.已知圆M:(θ为参数)的圆心F是抛物线E:的焦点,过F的直线交抛物线于A,B两点,求|AF|·|FB|的取值范围. 解:圆M:的普通方程是(x-1)2+y2=1, 所以F(1,0). 抛物线E:的普通方程是y2=2px, 所以=1,p=2,抛物线的方程为y2=4x. 设过焦点F的直线的参数方程为(t为参数). 代入y2=4x,得t2sin2φ-4tcosφ-4=0. 所以|AF|·|FB|=|t1t2|=. 因为0查看更多